#include <opencv2/core.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/imgcodecs.hpp>
#include <iostream>
using namespace std;
// 四重循环慢得要死,怎么优化呢?
static cv::Mat myDft(const cv::Mat& mat)
{
CV_Assert(CV_64FC1 == mat.type());
const int cols = mat.cols, rows = mat.rows;
cv::Mat res_real(cv::Size(cols, rows), CV_64FC1); // 保存实部
cv::Mat res_imag(cv::Size(cols, rows), CV_64FC1); // 保存虚部
for (int v = 0; v < rows; ++v) // 累加子项
{
double* p_real = res_real.ptr<double>(v);
double* p_imag = res_imag.ptr<double>(v);
for (int u = 0; u < cols; ++u)
{
double sum_real = 0.0; // 实部和
double sum_imag = 0.0; // 虚部和
for (int y = 0; y < rows; ++y)
{
const double* ptr = mat.ptr<double>(y);
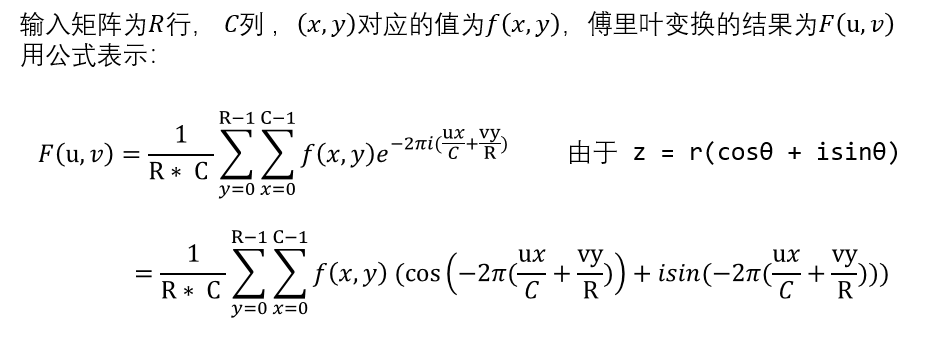
for (int x = 0; x < cols; ++x) // z = r(cosθ + isinθ) => real = rcosθ, imag = rsinθ
{
double theta = -2.0 * CV_PI * (1.0 * u * x / cols + 1.0 * v * y / rows);
sum_real += ptr[x] * cos(theta);
sum_imag += ptr[x] * sin(theta);
}
}
p_real[u] = sum_real;
p_imag[u] = sum_imag;
}
}
// 合并实部与虚部
cv::Mat result, plane[] = { res_real, res_imag };
cv::merge(plane, 2, result);
if (result.empty())
return cv::Mat();
return result;
}
int main()
{
cv::Mat mat(21, 7, CV_8UC1);
cv::randu(mat, cv::Scalar::all(0), cv::Scalar::all(255));
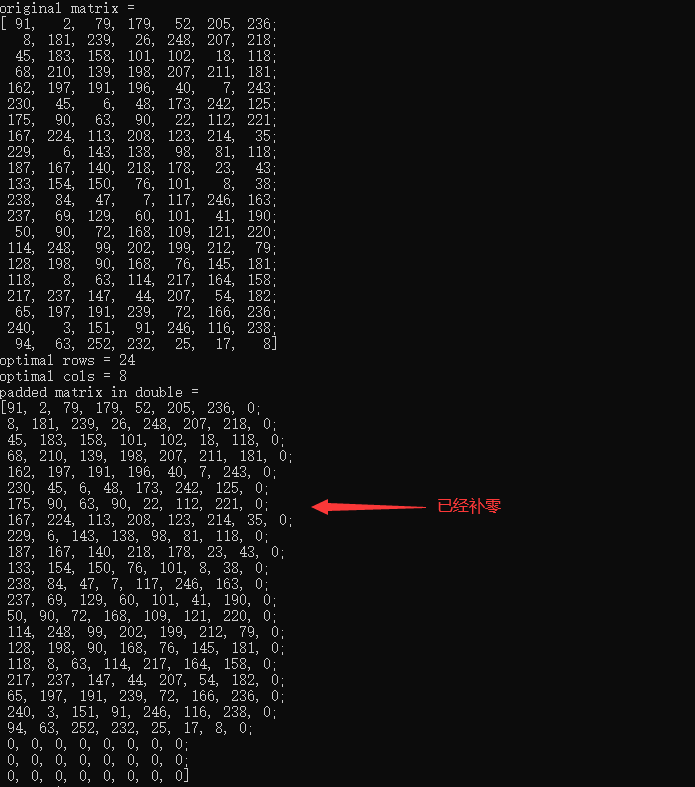
cout << "original matrix = \n" << mat << endl;
cv::Mat paddedMat;
int optimalRows = cv::getOptimalDFTSize(mat.rows);
int optimalCols = cv::getOptimalDFTSize(mat.cols);
cout << "optimal rows = " << optimalRows << endl;
cout << "optimal cols = " << optimalCols << endl;
cv::copyMakeBorder(mat, paddedMat, 0, optimalRows - mat.rows, 0, optimalCols - mat.cols, cv::BORDER_CONSTANT, cv::Scalar::all(0));
cv::Mat paddedMatDouble;
paddedMat.convertTo(paddedMatDouble, CV_64FC1);
cout << "padded matrix in double = \n" << paddedMatDouble << endl;
cv::Mat dft_res;
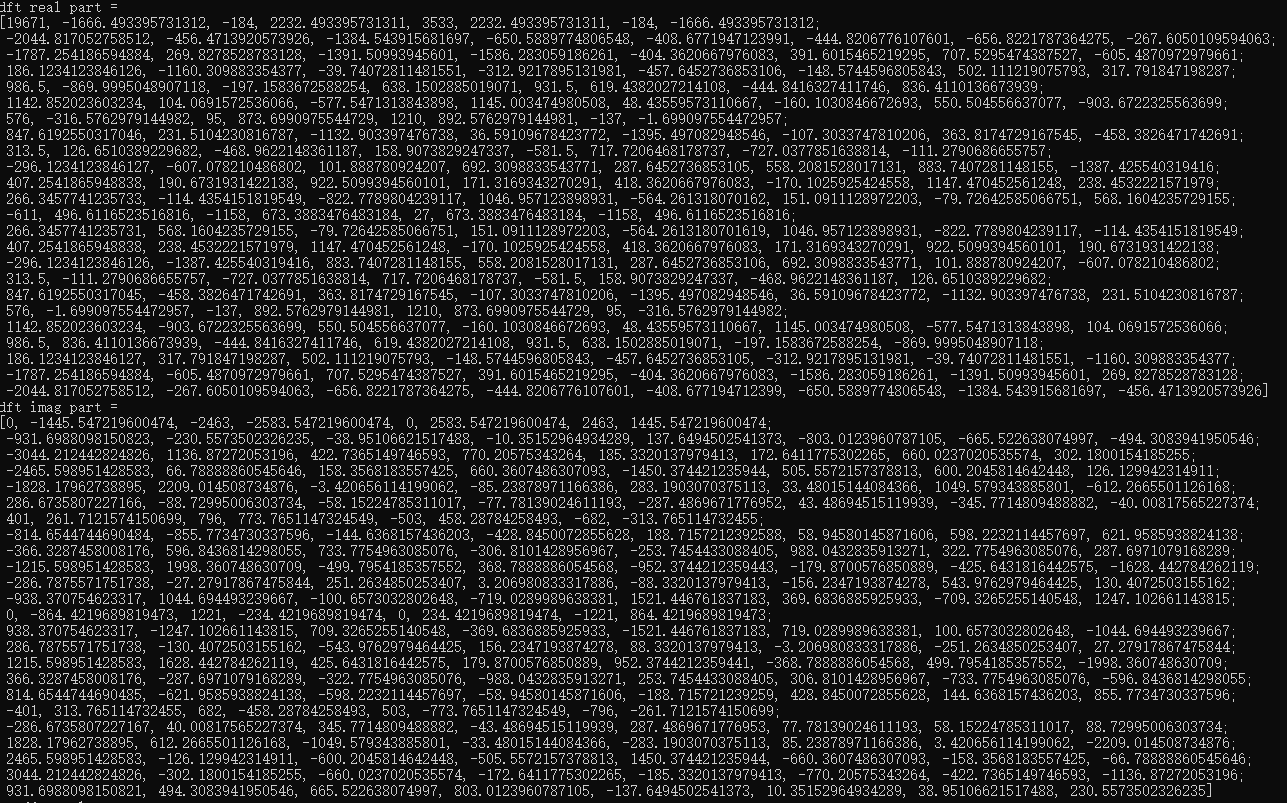
cv::dft(paddedMatDouble, dft_res, cv::DFT_COMPLEX_OUTPUT);
if (dft_res.empty())
return -1;
cv::Mat dft_real_imag[] = { cv::Mat::zeros(dft_res.size(), CV_64FC1), cv::Mat::zeros(dft_res.size(), CV_64FC1) };
cv::split(dft_res, dft_real_imag);
cout << "dft real part = \n" << dft_real_imag[0] << endl;
cout << "dft imag part = \n" << dft_real_imag[1] << endl;
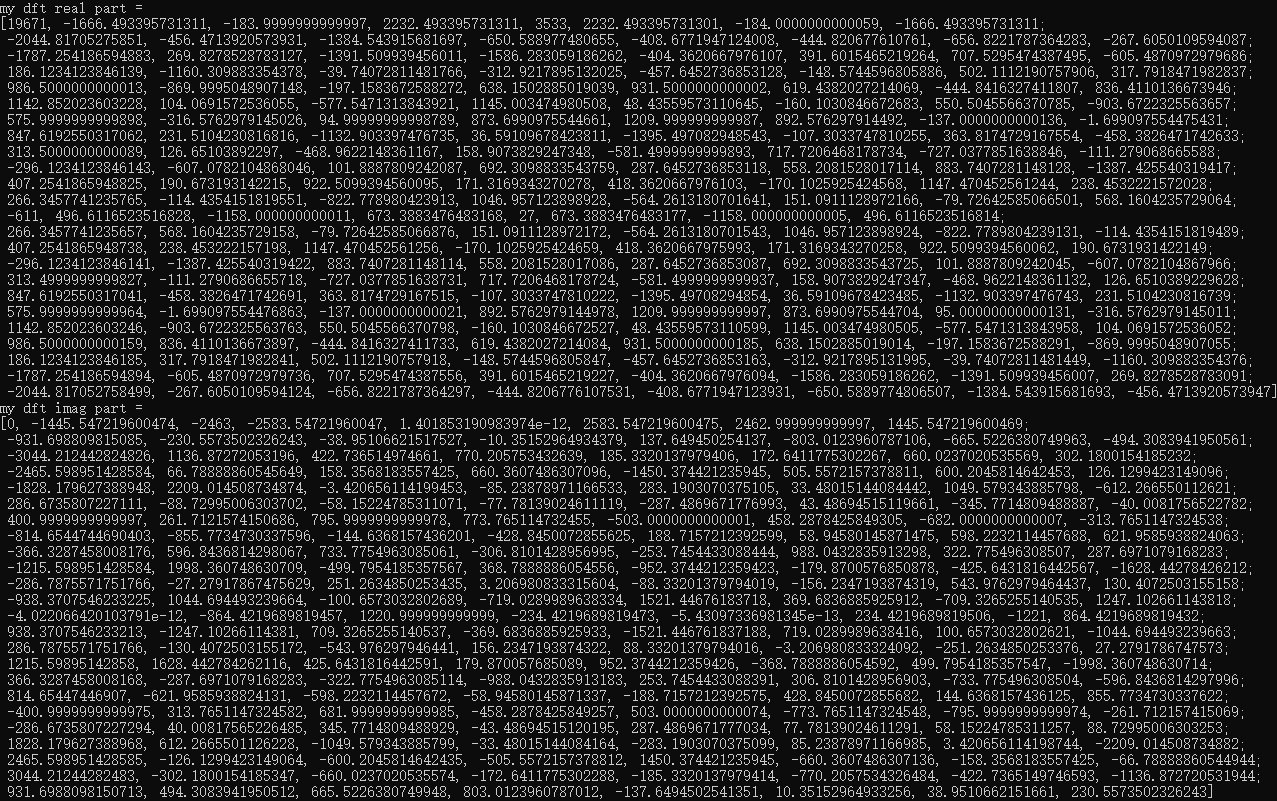
cv::Mat my_dft_res = myDft(paddedMatDouble);
if (my_dft_res.empty())
return -1;
cv::Mat my_dft_real_imag[] = { cv::Mat::zeros(my_dft_res.size(), CV_64FC1), cv::Mat::zeros(my_dft_res.size(), CV_64FC1) };
cv::split(my_dft_res, my_dft_real_imag);
cout << "my dft real part = \n" << my_dft_real_imag[0] << endl;
cout << "my dft imag part = \n" << my_dft_real_imag[1] << endl;
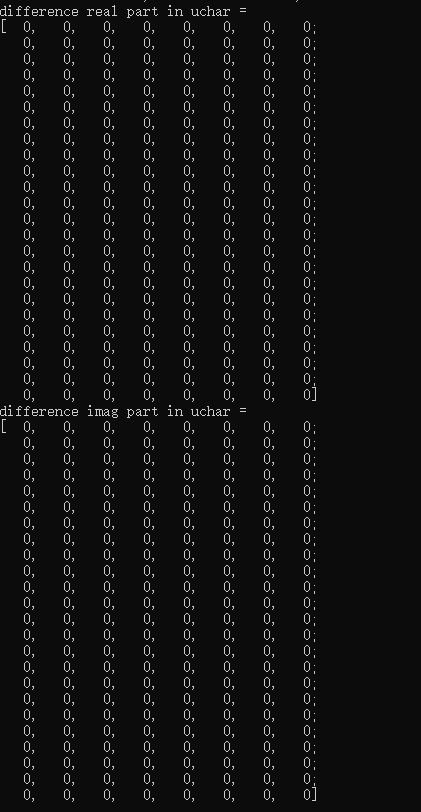
cv::Mat diff_real_double = my_dft_real_imag[0] - dft_real_imag[0];
cv::Mat diff_imag_double = my_dft_real_imag[1] - dft_real_imag[1];
cv::Mat diff_real_uchar, diff_imag_uchar; // 为了使输出不受精度影响, 转化成uchar
diff_real_double.convertTo(diff_real_uchar, CV_8UC1);
diff_imag_double.convertTo(diff_imag_uchar, CV_8UC1);
cout << "difference real part = \n" << diff_real_uchar << endl;
cout << "difference imag part = \n" << diff_imag_uchar << endl;
return 0;
}