
来自算法基础课
树和图的存储(有向图,如果是无向图就存储两条有向边即可)
1.邻接表(适合于稀疏图)
const int N = 100005;
int h[N], e[N * 2], w[N * 2], ne[N * 2], idx;
memset(h, -1, sizeof(h));
void add(int a, int b, int c){
e[idx] = b;
w[idx] = c;
ne[idx] = h[a];
h[a] = idx;
idx ++;
}
2.邻接矩阵(适合于稠密图)
const int N = 1005;
int g[N][N];
memset(g, 0x3f, sizeof(g));
void add(int a, int b, int c){
g[a][b] = min(g[a][b], c);
}
树和图的深度优先搜索 $O(m)$
const int N = 100005;
int h[N], e[N * 2], ne[N * 2], idx;
bool st[N];
void dfs(int u){
st[u] = true;
for(int i = h[u]; i != -1; i = ne[i]){
int j = e[i];
if(!st[j]){
// 具体问题的逻辑
dfs(j);
}
}
}
树和图的广度优先遍历 $O(m)$
const int N = 100005;
int h[N], e[N * 2], ne[N * 2], idx;
bool st[N];
void bfs(){
memset(st, false, sizeof(st));
st[1] = true;
queue<int> q;
q.push(1);
while(!q.empty()){
int u = q.front();
q.pop();
for(int i = h[u]; i != -1; i = ne[i]){
int j = e[i];
if(st[j] == false){
// 具体问题的逻辑
st[j] = true;
q.push(j);
}
}
}
}
topsort(拓扑排序) $O(m)$
const int N = 100005;
int e[N], ne[N], h[N], idx;
int q[N], hh = 0, tt = -1;
int d[N];
void add(int a, int b){
e[idx] = b;
ne[idx] = h[a];
h[a] = idx;
idx ++;
d[b] ++;
}
void print(bool is_ok){
if(is_ok == false)
puts("impossible");
else{
for(int i = 0; i < n - 1; i ++)
printf("%d ", q[i]);
putchar('\n');
}
}
void topsort(){
for(int i = 1; i <= n; i ++)
if(d[i] == 0)
q[++ tt] = i;
while(hh <= tt){
int t = q[hh ++];
for(int i = h[t]; i != -1; i = ne[i]){
int j = e[i];
d[j] --;
if(d[j] == 0)
q[++ tt] = j;
}
}
print(tt == n - 1);
}
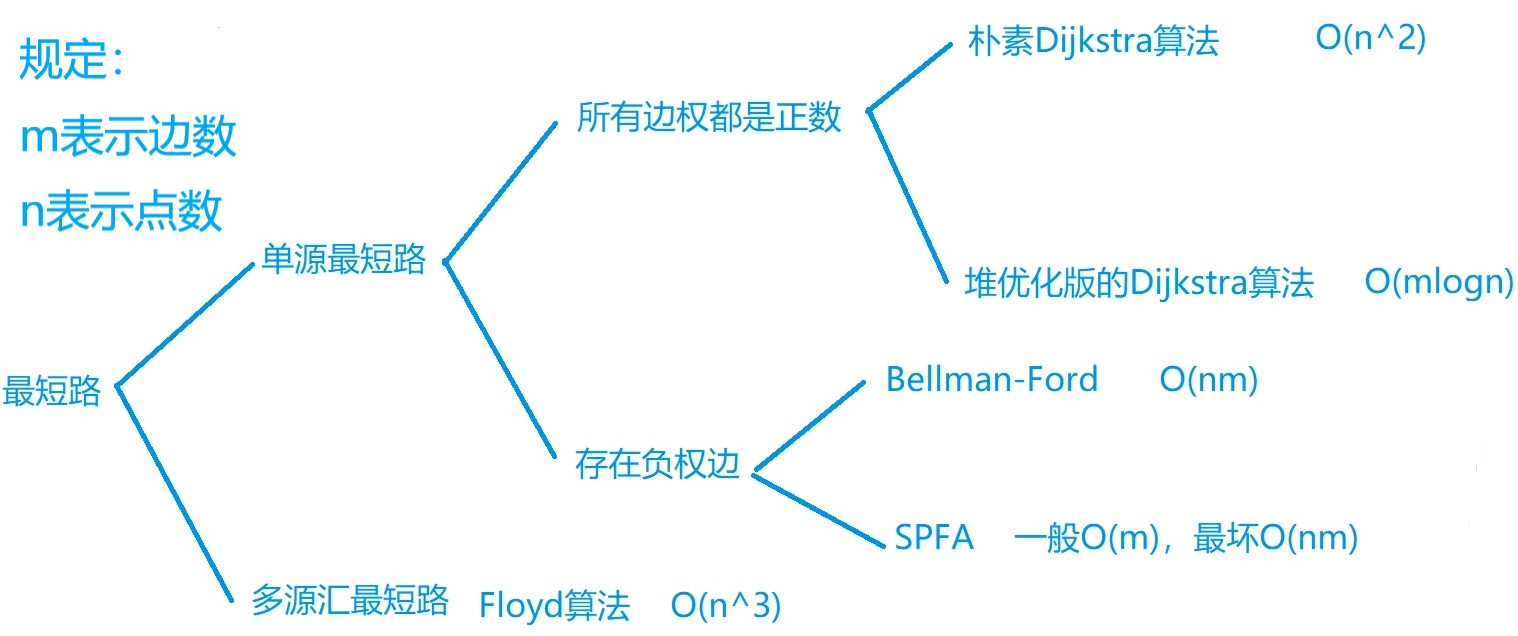
朴素版Dijkstra算法 $O(n ^ 2)$
/*
Dijkstra算法:
1.dist[1] = 0, dist[i] = ∞(i = 2~n)
2.循环n次
t<-不在集合中的距离最近的点
将t加入S
用t更新其他点的距离
3.if dist[n] > 0x3f3f3f3f
就说明不存在最短路
else
dist[n]就是1~n的最短路
*/
#include<bits/stdc++.h>
using namespace std;
const int N = 505;
int g[N][N], dist[N], st[N];
int n, m;
int dijkstra(){
memset(dist, 0x3f, sizeof(dist));
dist[1] = 0;
for(int i = 1; i <= n; i ++){
int t = -1;
for(int j = 1; j <= n; j ++)
if(!st[j] && (t == -1 || dist[t] > dist[j]))
t = j;
st[t] = true;
for(int j = 1; j <= n; j ++)
dist[j] = min(dist[j], dist[t] + g[t][j]);
}
if(dist[n] == 0x3f3f3f3f)
return -1;
else
return dist[n];
}
int main(){
scanf("%d %d", &n, &m);
memset(g, 0x3f, sizeof(g));
while(m --){
int a, b, c;
scanf("%d %d %d", &a, &b, &c);
g[a][b] = min(g[a][b], c);
}
printf("%d\n", dijkstra());
return 0;
}
堆优化版Dijkstra算法 $O(mlog(m))$
/*
堆优化Dijkstra算法:
1.dist[1] = 0, dist[i] = ∞(i = 2~n)
2.heap:(0,1)
3.while heap不空
t<-堆顶元素
将t加入S
for t的所有出边a->b
如果可以更新1->b的距离
将b加入heap
4.if dist[n] > 0x3f3f3f3f
就说明不存在最短路
else
dist[n]就是1~n的最短路
*/
#include<bits/stdc++.h>
using namespace std;
typedef pair<int, int> PII;
const int N = 100005;
int h[N], e[N], w[N], ne[N], idx;
int dist[N], st[N];
int n, m;
void add(int a, int b, int c){
e[idx] = b;
w[idx] = c;
ne[idx] = h[a];
h[a] = idx;
idx ++;
}
int dijkstra(){
memset(st, false, sizeof(st));
memset(dist, 0x3f, sizeof(dist));
dist[1] = 0;
priority_queue<PII, vector<PII>, greater<PII> > q;
q.push(make_pair(0, 1));
while(!q.empty()){
PII t = q.top();
q.pop();
int ver = t.second, distance = t.first;
if(st[ver])
continue;
st[ver] = true;
for(int i = h[ver]; i != -1; i = ne[i]){
int j = e[i];
if(dist[j] > distance + w[i]){
dist[j] = distance + w[i];
q.push(make_pair(dist[j], j));
}
}
}
return (dist[n] == 0x3f3f3f3f ? -1 : dist[n]);
}
int main(){
memset(h, -1, sizeof(h));
scanf("%d %d", &n, &m);
while(m --){
int a, b, c;
scanf("%d %d %d", &a, &b, &c);
add(a, b, c);
}
printf("%d\n", dijkstra());
return 0;
}
Bellman_ford算法 $O(n * m)$
/*
Bellman_ford算法:
1.dist[1] = 0, dist[i] = ∞(i = 2~n)
2.循环k次
backup = dist
循环所有边a->b, 权重为w
如果dist[b]可以被更新
更新dist[b]
3.if dist[n] > 0x3f3f3f3f / 2
不存在最短路
else
dist[n]就是1~n的最短路
*/
#include<bits/stdc++.h>
using namespace std;
const int N = 505, M = 10005;
int dist[N], backup[N];
int n, m, k;
struct Edge{
int a, b, w;
}edges[M];
int bellman_ford(){
memset(dist, 0x3f, sizeof(dist));
dist[1] = 0;
for(int i = 0; i < k; i ++){
memcpy(backup, dist, sizeof(dist));
for(int j = 0; j < m; j ++){
int a = edges[j].a, b = edges[j].b, w = edges[j].w;
dist[b] = min(dist[b], backup[a] + w);
}
}
return (dist[n] > 0x3f3f3f3f / 2 ? 0x3f3f3f3f : dist[n]);
}
int main(){
scanf("%d %d %d", &n, &m, &k);
for(int i = 0; i < m; i ++){
int a, b, w;
scanf("%d %d %d", &a, &b, &w);
edges[i] = {a, b, w};
}
int t = bellman_ford();
if(t == 0x3f3f3f3f)
puts("impossible");
else
printf("%d\n", dist[n]);
return 0;
}
Spfa算法 $平均为O(km), 最坏O(n * m)$
/*
Spfa算法:
1.dist[1] = 0, dist[i] = ∞(i = 2~n)
2.queue:1
3.while queue不空
t<-queue.front()
更新t的所有出边a->b, 权重为w
将b加入queue
4.if dist[n] = ∞
就说明不存在最短路
else
dist[n]就是1~n的最短路
*/
#include<bits/stdc++.h>
using namespace std;
const int N = 100005;
int h[N], e[N], ne[N], w[N], idx;
int dist[N], st[N];
int n, m;
void add(int a, int b, int c){
e[idx] = b;
ne[idx] = h[a];
h[a] = idx;
w[idx] = c;
idx ++;
}
int spfa(){
memset(dist, 0x3f, sizeof(dist));
dist[1] = 0;
queue<int> q;
q.push(1);
st[1] = true;
while(!q.empty()){
int u = q.front();
q.pop();
st[u] = false;
for(int i = h[u]; i != -1; i = ne[i]){
int j = e[i];
if(dist[j] > dist[u] + w[i]){
dist[j] = dist[u] + w[i];
if(!st[j]){
q.push(j);
st[j] = true;
}
}
}
}
return dist[n];
}
int main(){
memset(h, -1, sizeof(h));
scanf("%d %d", &n, &m);
while(m --){
int a, b, w;
scanf("%d %d %d", &a, &b, &w);
add(a, b, w);
}
int t = spfa();
if(t == 0x3f3f3f3f)
puts("impossible");
else
printf("%d\n", t);
return 0;
}
用Spfa判断负环 $平均为O(km), 最坏O(n * m)$
/*
Spfa判断负环算法:
1.dist[1] = 0, dist[i] = ∞(i = 2~n)
2.queue:1
3.while queue不空
t<-queue.front()
更新t的所有出边a->b, 权重为w
将b加入queue
if 存在一个j使得从1到j的最短路长度>=n
就说明有负环
4.如果最后不存在一个j使得从1到j的最短路长度>=n
就说明没有负环
*/
#include<bits/stdc++.h>
using namespace std;
const int N = 2005, M = 10005;
int h[N], w[M], e[M], ne[M], idx;
int dist[N], cnt[N];
bool st[N];
int n, m;
void add(int a, int b, int c){
w[idx] = c;
e[idx] = b;
ne[idx] = h[a];
h[a] = idx;
idx ++;
}
bool spfa(){
memset(dist, 0x3f, sizeof(dist));
dist[1] = 0;
queue<int> q;
for(int i = 1; i <= n; i ++){
q.push(i);
st[i] = true;
}
while(!q.empty()){
int u = q.front();
q.pop();
st[u] = false;
for(int i = h[u]; i != -1; i = ne[i]){
int j = e[i];
if(dist[j] > dist[u] + w[i]){
dist[j] = dist[u] + w[i];
cnt[j] = cnt[u] + 1;
if(!st[j]){
q.push(j);
st[j] = true;
}
if(cnt[j] >= n)
return true;
}
}
}
return false;
}
int main(){
memset(h, -1, sizeof(h));
scanf("%d %d", &n, &m);
while(m --){
int a, b, c;
scanf("%d %d %d", &a, &b, &c);
add(a, b, c);
}
if(spfa())
puts("Yes");
else
puts("No");
return 0;
}
Floyd算法 $O(n ^ 3)$
/*
Floyd算法:基于动态规划
1.d[i][j]为i->j边的权重(若无,则为∞)
2.for(int k = 1; k <= n; k ++)
for(int i = 1; i <= n; i ++)
for(int j = 1; j <= n; j ++)
从i到j的距离更新成i到k的距离加上k到j的距离
3.if dist[n] > 0x3f3f3f3f / 2
就说明不存在最短路
else
dist[n]就是1~n的最短路
*/
#include<bits/stdc++.h>
using namespace std;
const int N = 205, INF = 0x3f3f3f3f;
int d[N][N];
int n, m, Q;
void floyd(){
for(int k = 1; k <= n; k ++)
for(int i = 1; i <= n; i ++)
for(int j = 1; j <= n; j ++)
d[i][j] = min(d[i][j], d[i][k] + d[k][j]);
}
int main(){
scanf("%d %d %d", &n, &m, &Q);
memset(d, 0x3f, sizeof(d));
for(int i = 1; i <= n; i ++)
d[i][i] = 0;
while(m --){
int a, b, c;
scanf("%d %d %d", &a, &b, &c);
d[a][b] = min(d[a][b], c);
}
floyd();
while(Q --){
int a, b;
scanf("%d %d", &a, &b);
if(d[a][b] >= INF / 2)
puts("impossible");
else
printf("%d\n", d[a][b]);
}
return 0;
}
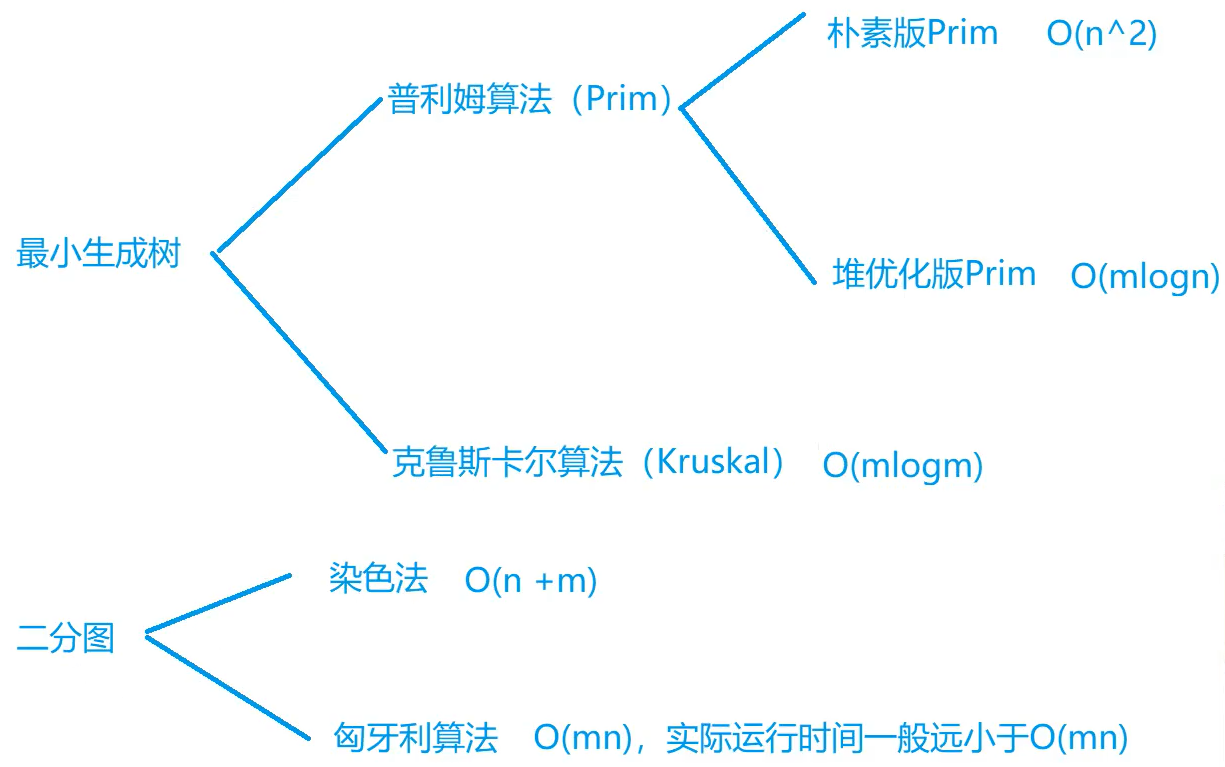
朴素版Prim算法 $O(n ^ 2)$
/*
Prim算法:
1.dist[i] = ∞
2.循环n次
t<-集合外离集合最近的点
用t更新其他所有点到集合的距离
t加入集合
*/
#include<bits/stdc++.h>
using namespace std;
const int N = 505, INF = 0x3f3f3f3f;
int g[N][N], dist[N];
bool st[N];
int n, m;
int prim(){
int res = 0;
memset(dist, 0x3f, sizeof(dist));
for(int i = 0; i < n; i ++){
int t = -1;
for(int j = 1; j <= n; j ++)
if(!st[j] && (t == -1 || dist[t] > dist[j]))
t = j;
if(i && dist[t] == INF)
return INF;
if(i)
res += dist[t];
for(int j = 1; j <= n; j ++)
dist[j] = min(dist[j], g[t][j]);
st[t] = true;
}
return res;
}
int main(){
memset(g, 0x3f, sizeof(g));
scanf("%d %d", &n, &m);
while(m --){
int a, b, c;
scanf("%d %d %d", &a, &b, &c);
g[a][b] = min(g[a][b], c);
g[b][a] = min(g[b][a], c);
}
int t = prim();
if(t == INF)
puts("impossible");
else
printf("%d\n", t);
return 0;
}
Kruskal算法 $O(mlog(m))$
/*
Kruskal算法:O(mlog(m))
1.将所有遍按从小到大排序(这是Kruskal算法的瓶颈) O(mlog(m))
2.枚举每条边a-b,权重是w O(m)
if a,b不在一个集合之中
就将这条边加入集合(cnt ++,res += w)
3.if cnt < n-1
就说明图是不连通的
else
res存的就是最小生成树的树边权重之和
因为要合并集合,所以要用并查集维护
*/
#include<bits/stdc++.h>
using namespace std;
const int N = 200005;
int p[N];
int n, m, res = 0, cnt = 0;
struct Edge{
int a, b, w;
bool operator< (const Edge& W)const{
return w < W.w;
}
}edges[N];
int find(int x){
if(p[x] != x)
p[x] = find(p[x]);
return p[x];
}
void kruskal(){
for(int i = 1; i <= n; i ++)
p[i] = i;
sort(edges, edges + m);
for(int i = 0; i < m; i ++){
int a = edges[i].a, b = edges[i].b, w = edges[i].w;
int A = find(a), B = find(b);
if(A != B){
p[A] = B;
res += w;
cnt ++;
}
}
}
int main(){
scanf("%d %d", &n, &m);
for(int i = 0; i < m; i ++){
int a, b, w;
scanf("%d %d %d", &a, &b, &w);
edges[i] = {a, b, w};
}
kruskal();
if(cnt < n - 1)
puts("impossible");
else
printf("%d\n", res);
return 0;
}
染色法判断二分图 $O(n + m)$
/*
染色法:
1.color[] = 0; 0表示没有染色,1表示染黑色,2表示染白色
2.dfs(u, c) 表示第u个点染颜色c是否行
(1)color[u] = c
(2)for u的所有出边u->j
1°.if j这个点没有染色
if dfs(j, 3 - c)不成立
return false
2°.if color[j]和c相等
return false
3.for i = 1~n
if 这个点没有染色
if dfs(i, 1)不成立
就说明这个图不是二分图
else 就说明这个图是二分图
*/
#include<bits/stdc++.h>
using namespace std;
const int N = 100005;
int h[N], e[2 * N], ne[2 * N], idx;
int color[N];
int n, m;
void add(int a, int b){
e[idx] = b;
ne[idx] = h[a];
h[a] = idx;
idx ++;
}
bool dfs(int u, int c){
color[u] = c;
for(int i = h[u]; i != -1; i = ne[i]){
int j = e[i];
if(!color[j]){
if(!dfs(j, 3 - c))
return false;
}
else if(color[j] == c)
return false;
}
return true;
}
int main(){
memset(h, -1, sizeof(h));
scanf("%d %d", &n, &m);
while(m --){
int a, b;
scanf("%d %d", &a, &b);
add(a, b), add(b, a);
}
bool flag = true;
for(int i = 1; i <= n; i ++)
if(!color[i])
if(!dfs(i, 1)){
flag = false;
break;
}
if(!flag)
puts("No");
else
puts("Yes");
return 0;
}
二分图的最大匹配(匈牙利算法) $理论时间O(nm),实际运行时间远低于此值$
#include<bits/stdc++.h>
using namespace std;
const int N = 505, M = 100005;
int h[N], e[M], ne[M], idx;
int match[N];
bool st[N];
int n1, n2, m;
void add(int a, int b){
e[idx] = b;
ne[idx] = h[a];
h[a] = idx;
idx ++;
}
bool find(int x){
for(int i = h[x]; i != -1; i = ne[i]){
int j = e[i];
if(!st[j]){
st[j] = true;
if(match[j] == 0 || find(match[j])){
match[j] = x;
return true;
}
}
}
return false;
}
int xiongyali(){
int res = 0;
for(int i = 1; i <= n1; i ++){
memset(st, false, sizeof(st));
if(find(i))
res ++;
}
return res;
}
int main(){
memset(h, -1, sizeof(h));
scanf("%d %d %d", &n1, &n2, &m);
while(m --){
int a, b;
scanf("%d %d", &a, &b);
add(a, b);
}
int t = xiongyali();
printf("%d\n", t);
return 0;
}

tql