
线性拟合
1 - 什么是线性拟合
举个直观的例子,在平面直角坐标系中已知一系列点,
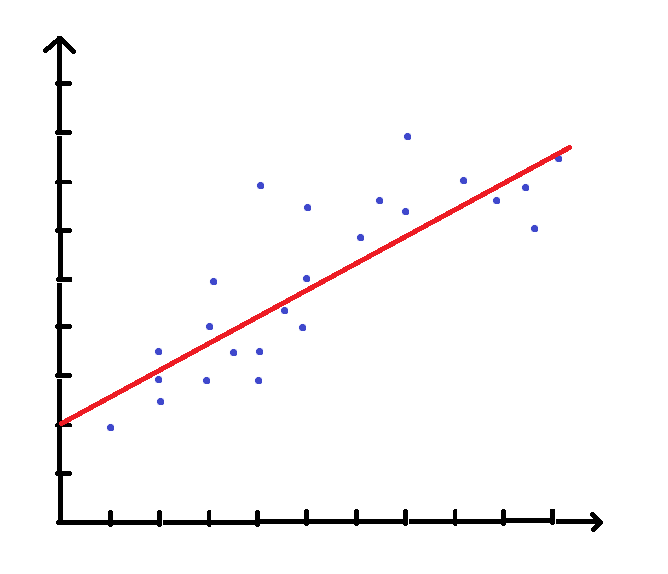
尽管略有偏差,但是凭借人类的直觉,
我们不难看出这些点大都分布在直线 y=12x+2 两侧。
线性拟合要做的就是这样一件事,
——画“线”来拟合点分布的规律。
在这个例子里,自变量和因变量各有一个,
类似的例子还有:
- 自变量 x 为温度,因变量 y 为体温计的水银柱高度
- 自变量 x 为大楼层数,因变量 y 为该楼高度
- 自变量 x 为赛道长度,因变量 y 为运动员耗时
- …………
但更多时候,自变量和因变量可以是多个,
比如:
- 自变量为 x1 , x2 ,因变量为 y=1.2x1+0.8x2
- 自变量为天数,因变量为甲队施工进度和乙队施工进度
- 自变量为试卷题量、难度,因变量为成绩达标的学生数量、成绩优秀的学生数量
- …………
不过,多个因变量的情况和一个因变量的情况其实是一样的,
因为它可以被拆解为多个单因变量的问题。
所以,我们知道了一系列数据:
自变量 ---------> 因变量
x(1)1 x(1)2 … x(1)m ----> y(1)
x(2)1 x(2)2 … x(2)m ----> y(2)
…………
x(n)1 x(n)2 … x(n)m ----> y(n)
(第 i 行的自变量记为 x(i) , 第 i 行第 j 个自变量记为 x(i)j)
希望找出一个函数
fK(x)=k0+k1x1+k2x2+…+kmxm ,
(k0 , k1 , k2 … km 记为 K)
使得 J(K)=12n∑ni=1(fK(x(i))−y(i))2 最小,
乘 12n 是为了后面计算方便。
可以发现 J(K) 越小,我们预测的值 fK(x) 总体上就越接近 y ,
正合我们的意思。
2 - 如何做线性拟合
(1) 梯度下降法
现在问题被转化为了 找到合适的 K 使得 J(K) 最小
用推公式的方法貌似太难了,所以我们用一种直观的思维考虑。
想象一下:
你身处群山之中,
各个系数 k0,k1… ,就是经度、纬度……
某个经纬度上的山高,就是这些系数对应的 J(K) ,
你一开始在某个位置,想用尽量少的步数走到低处,
也就是用尽量少的步数走到使 J(K) 最小的 K 处。
每一步该怎么走?从 方向 和 步长 两个方面来看。
尽量用最少的步数,意味着每次都要往最“陡”的方向前进,
而“最陡的方向”,又等于“东西方向上最陡的方向” + “南北方向上最陡的方向”,
或者说,斜着走一步可以等效于东西走一步再南北走一步。
至于步长,越陡迈步越大就行了。
(学过微积分的大佬,可能已经知道了,我们就是要往目前位置的 J(K) 关于各个系数的偏导的反方向前进)
但对于微积分没有系统学过的人(包括我),直接把伪代码给出来吧,
向最陡的方向走一步意味着:
j 从 1 到 m 枚举 kj
kj=kj−α1n∑ni=1(fK(x(i))−y(i))x(i)j
//这里 α 叫做学习率,
//用较小的学习率,就好像小心翼翼地试探,拟合结果比较精确
//用较大的学习率,就好像大步迈开向前进,拟合结果比较粗糙
k0 比较特殊, k0=k0−α1n∑ni=1(fK(x(i))−y(i))×1
所以我们也可以认为有一个 x(i)0 始终等于 1
这种方法称为 梯度下降法 ,
梯度就是前文所说的最“陡”的方向。
总流程如下:
- 初始化学习率 α ,大一些,
- 初始化位置 K ,一般为全 0 ,
- 持续往最“陡”的方向前进,直到停在原地或者走了太多步,
- 如果是走了太多步,那么适当减小学习率 α ,回到步骤 1 再试一次,
- 否则训练完成,你可以输入自变量,模型就会把它代入 fK,帮你估计因变量的值了。
(2) 学习率与结束边界
前文梯度下降法的第 3 步,我们要判断 K 是否停在了原地,
方法是设定一个很小的结束边界值 eps ,如果 ∀0≤i≤m,|kinow−kipast|<eps ,
那么就认为 K 稳定了。
但除了停在原地,还有一种走了太多步的情况。
由于 alpha 不合适造成这种情况的原因有两种,如图:
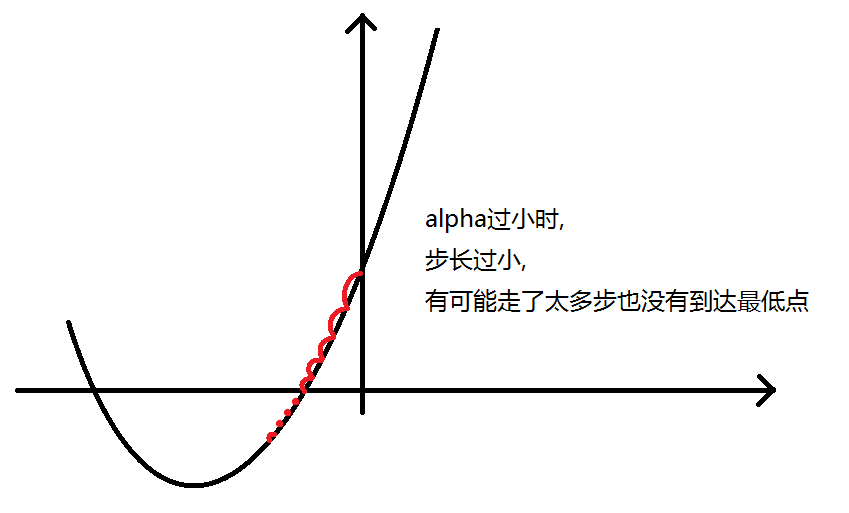
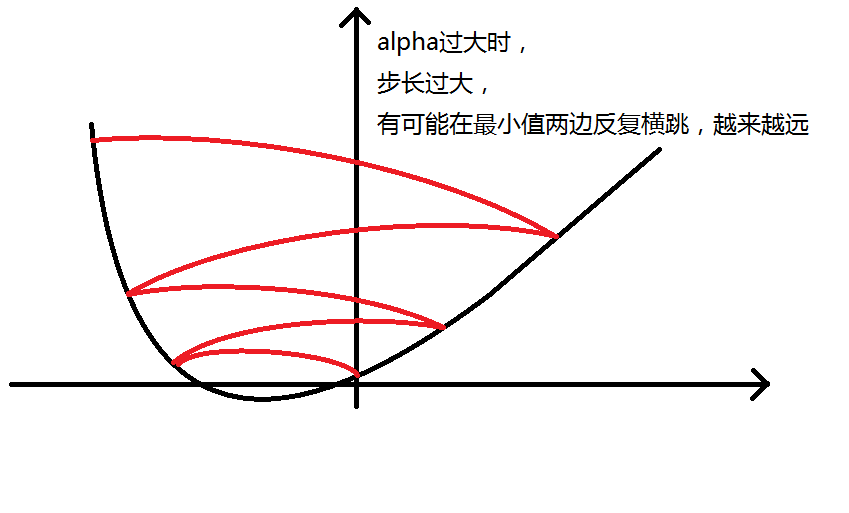
正因为如此,我们在梯度下降时要尝试不同的 α 。
注意 eps 的值也要合适,否则可能出现这样的错误:
- 相对于 alpha , eps 如果过大,条件太宽松,可能导致程序误判 K 已经停在原地,过早停止迭代
- 相对于 alpha , eps 如果过小,条件太苛刻,可能导致程序迭代太久,这种情况要与上文的 alpha 过大分清
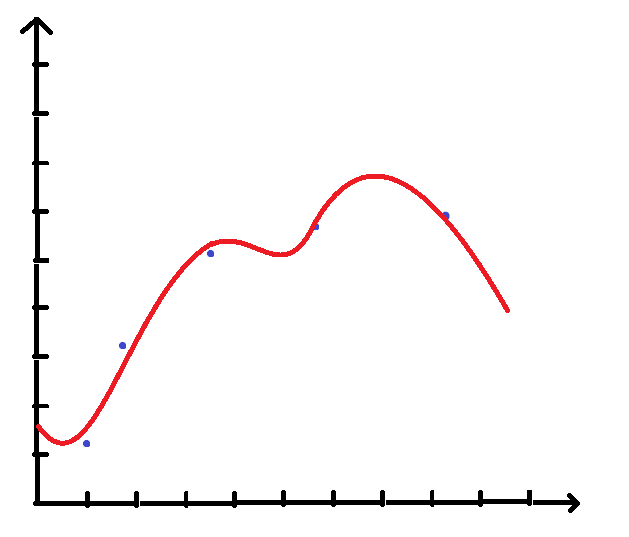
(3) 非线性拟合
回到开头的图,有人可能会认为用一条曲线,拟合效果更佳:
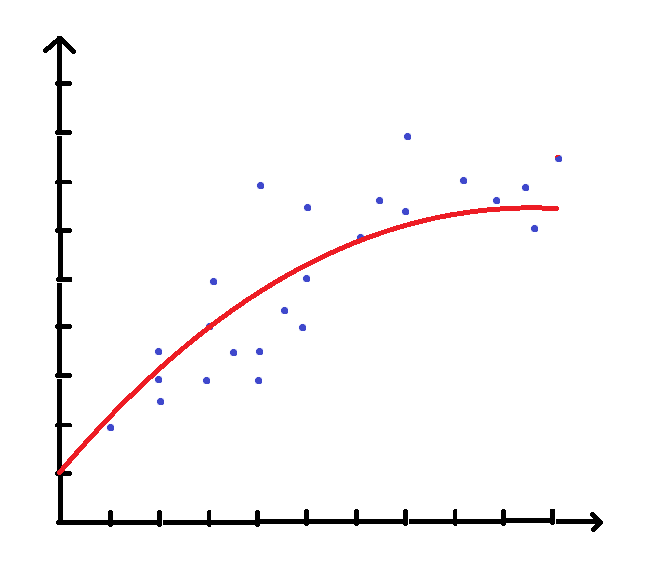
实现非线性拟合比较简单,
只需要加入一些非线性的自变量,
比如原自变量有 x1,x2 ,
我们可以添加诸如 x21 , x22 , x1x2 甚至 sinx1 , cosx2这样的项,
这样就实现了用线性拟合的方法解决非线性拟合问题。
(4) 正则化
进行非线性拟合时,有可能出现这样一种情况:
这个模型在训练集上表现非常好,
但很明显,它并不能反应数据分布的规律,
这种情况被称为 过拟合 。
究其原因,是因为高次项的系数太大,对模型的影响太大。
于是,我们便需要一种优化方法,约束高次项的系数,
这种方法称为 正则化 。
正则化有两种: L1 和 L2 正则化,
这里讲更常用的 L2 正则化。
对 J(K) 进行修改:
J(K)=12n∑ni=1(fK(x(i))−y(i))2+λ2n∑mi=1k2i
之前讲的伪代码也要相应地修改:
kj=(1−αλn)kj−α1n∑ni=1(fK(x(i))−y(i))x(i)j
但 k0=k0−α1n∑ni=1(fK(x(i))−y(i))×1 不变
每次更新 K 时先将非常数项的系数缩小,再加上偏移量,
就可以有效地防止过拟合。
(5) 数据缩放
一些自变量、因变量的范围很大(如二次、三次项)或很小,
先对它们进行缩放调整,
再进行训练和使用。
通俗了说就是防止爆double
3 - C++代码实现
//简单起见,因变量只有一个,只能添加原自变量的指数作为新自变量,用于非线性拟合
#include <iostream>
#include <cstring>
#include <algorithm>
#include <cmath>
#include <fstream>
using namespace std;
const int N = 100010, M = 110;
const double eps = 1e-4;
int n, m, k;
double alpha = 1.0, lambda = 5.0;
bool reg = true;
struct Data {
double x[M], y;
} datas[N];
struct Weight {
double theta[M];
} result, tmp;
struct Ratio {
double x[M], y;
} ratio;
double h(double x[]) {
double res = 0.0;
for (int i = 0; i <= m; i ++) res += result.theta[i] * x[i];
return res;
}
bool GDA() {
memset(result.theta, 0, sizeof(result.theta));
int limit = 100000, cnt = 0;
while (cnt < limit) {
for (int j = 0; j <= m; j ++) {
tmp.theta[j] = 0.0;
for (int i = 1; i <= n; i ++)
tmp.theta[j] += (h(datas[i].x) - datas[i].y) * datas[i].x[j] / n * alpha;
tmp.theta[j] += (j > 0) * reg * alpha * lambda / n * result.theta[j];
}
bool flag = true;
for (int j = 0; j <= m; j ++) flag &= (fabs(tmp.theta[j]) < eps);
if (flag) return true;
for (int j = 0; j <= m; j ++) result.theta[j] -= tmp.theta[j];
cnt ++;
// for (int i = 0; i <= m; i ++) printf("%.1lf ", result.theta[i]);
// puts("");
if (cnt % (limit / 10) == 0) printf("%d %\n", cnt / (limit / 100));
}
return false;
}
int main() {
printf("数据组数:"); scanf("%d", &n);
printf("特征个数:"); scanf("%d", &m);
printf("多项式次数:"); scanf("%d", &k);
m *= k;
printf("输入缩放倍率:\n");
printf("常数项缩放倍率:"); scanf("%lf", &ratio.x[0]);
for (int i = 1, j = 1; i <= m; i += k, j ++)
for (int u = 0; u < k; u ++) {
printf("特征%d,%d次幂缩放倍率:", j, u + 1);
scanf("%lf", &ratio.x[i + u]);
}
printf("输出缩放倍率: "); scanf("%lf", &ratio.y);
printf("是否正则化:"); scanf("%d", ®);
if (reg) printf("正则化参数:"), scanf("%lf", &lambda);
ifstream in("这里填输入文件的位置,如C:\\Users\\xxxxx\\Desktop\\datas.txt,注意用双斜杠");
for (int i = 1; i <= n; i ++) {
datas[i].x[0] = 1.0 * ratio.x[0];
for (int j = 1; j <= m; j += k) {
double x;
in >> x;
double val = 1.0;
for (int u = 0; u < k; u ++) {
val *= x;
datas[i].x[j + u] = val * ratio.x[j + u];
}
}
in >> datas[i].y;
datas[i].y *= ratio.y;
}
while (alpha >= 0.001) {
printf("alpha = %.3lf\n", alpha);
bool flag = GDA();
if (flag) break;
else alpha /= 10;
}
printf("[%.3lf]\n", result.theta[0] * ratio.x[0] / ratio.y);
for (int i = 1, j = 1; i <= m; i += k, j ++)
{
putchar('[');
for (int u = 0; u < k; u ++)
{
printf("%.3lf", result.theta[i + u] * ratio.x[i + u] / ratio.y, j, u + 1);
if (u < k - 1) printf(", ");
}
puts("]");
}
puts("");
double query[M];
while (true) {
query[0] = 1.0;
for (int i = 1; i <= m; i += k) {
double x;
scanf("%lf", &x);
double val = 1.0;
for (int u = 0; u < k; u ++) {
val *= x;
query[i + u] = val * ratio.x[i + u];
}
}
double res = h(query) / ratio.y;
printf("%.3lf\n", res);
}
return 0;
}
其他
正则化后 伪代码 的证明:
对于 0<j≤m
kj=kj−α∂∂kjJ(K)=kj−α∂∂kj(12nn∑i=1(fK(x(i))−y(i))2+λ2nm∑i=1k2i)=kj−α∂∂kj12nn∑i=1(fK(x(i))−y(i))2−∂∂kjλ2nm∑i=1k2i=kj−α∂∂kj12nn∑i=1f2K(x(i))−α∂∂kj12nn∑i=12fK(x(i))y(i)−α∂∂kj12nn∑i=1y(i)2−∂∂kjλ2nm∑i=1k2i=kj−α∂∂kj1nn∑i=1(m∑t=0ktkjx(i)tx(i)j−k2jx(i)j)−α∂∂kj1nn∑i=1fK(x(i))y(i)−α∂∂kj12nn∑i=1y(i)2−∂∂kjλ2nm∑i=1k2i=kj−α1nn∑i=1(m∑t=0ktx(i)t)x(i)j−α1nn∑i=1y(i)x(i)j−αλnki=kj−α1nn∑i=1(fK(x(i))−y(i))x(i)j−αλnki=(1−αλn)ki−α1nn∑i=1(fK(x(i))−y(i))x(i)j
