
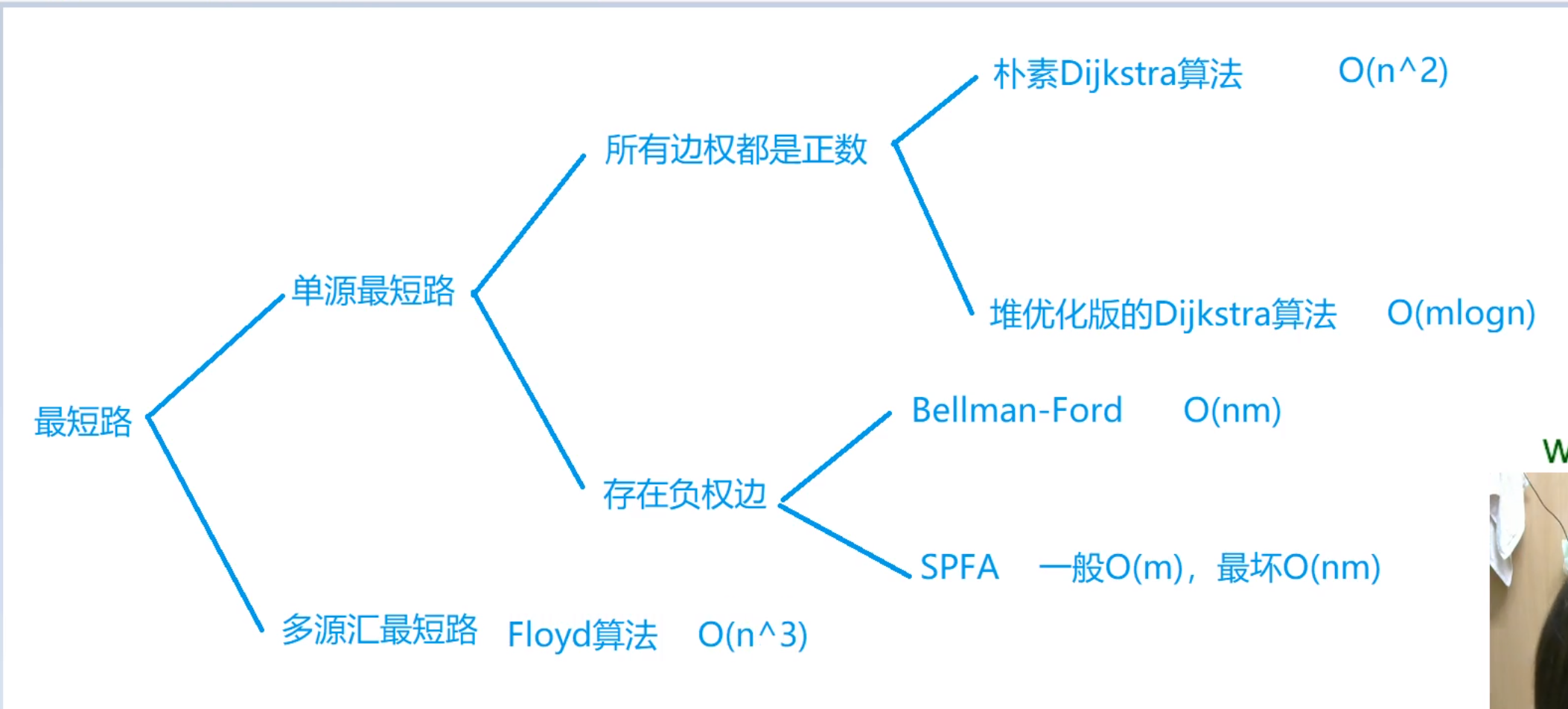
1、dijkstra朴素版 时间复杂度O(n^2) 适用与稠密图(点少边多)
以t=-1(不为1到n),用t来找到从1开始,未更新的点,之后以t为起点,更新所有t能到的点,因为从1开始,标记的点已是最短路径,后续不能更改已经标记的点,则如果后续有负权边,则不能更改已经确定的点,因此只能用于正权边的图
2、dijkstra堆优化 时间复杂度O(nlongm) 适用稀疏图(点与边)
这朴素版基础上,用小根堆可以更快找到未标记且是最小的点(队头,出队就标记,表示用已经确定)
3、bellman_ford 时间复杂度O(nm) 限制经过的边数
规定经过的边数,设有前一状态数组(backup)用前一个状态更新最新状态,(类似bfs?以前一状态更新,并且限制次数)这样就阻止发生串联反应(其实是更新的全部点,只不过除了backup能达的点外都更新错误,因为是在无穷的基础上运算,而不是在前一状态),确保这个一次更新是是前一状态能达的一边距离,如此k次,是为限制k次,k后若dis[n]是大于一定范围的数则无解(因为所了后面会更新,但是更新是错误的,n不一定是0x3f3f3f但他没有由前一状态更新,他的值是大于数据范围的(比如最大边数*最大长度))由此判断无解
4、spfa 时间复杂度O(m),最坏O(nm),可用于负权边的图
用队列储存能到达的、且是目前(注意是目前)距离最小的点,因为spfa更新最小距离的点是更新目前状态的,则在后续如果出现负权边的话可以再次更新已经确定状态的点(因为已经确定状态的点在出队的时候已经撤销标记,则变小后可再次入队,更新之前状态),则可用于有负权边的图
