
描述
在网络中关键节点的判断将成为影响网络连通性的主要因素。节点之间通过关键节点传递信息,如在我们以太网中的网关。当网关节点失效,那么两个网络之间的节点就不能够进行通信。在无线传感器网络中,会造成不能及时监控部分区域的信息。这次请编写程序主要实现一个简单的判断关键节点方法。
关键节点的定义:在图中有那么一些特殊的节点,如果去除这些点,则会使得从某个初始节点到某个终止节点的这两个节点变得不连通。这些点被称为最短路径上的关键点。现举例说明如下:
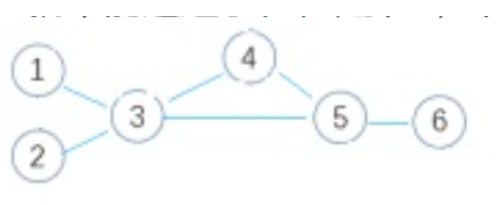
如图所示,若网络结构由6个节点组成,从节点1到节点6之间是连通的,并且有两个关键节点3和5。也就是说,如果这两个节点任何一个失效了,1到6就不能连通了。但是节2,节点4失效,不会影响1到6的连通。
现给定一个无权图,以及起始节点和终止节点,要求输出该图上,这对节点间的关键点数目。
输入
多组数据测试,每组测试数据如下:
输入多行:
第1行:输入节点数N(N<=1000)的路径数roat(N(N-1)/2<=roat<=3N)
第2行:第2+roat-1行: 输入每一节路径的起点与终点
第2+roat行:输入需查验的起点与终点
输出一行:
关键节点数
输出
每组输出一行:
关键节点数
样例输入
6 6
1 3
2 3
3 4
3 5
4 5
5 6
1 6
样例输出
2
思路
用并查集的数据结构解决
遍历所有节点(for (int i = 1; i <= n; i++))
重置并查集状态:考虑每个节点i时,重置并查集转态,考虑,以便独立测试节点i是否是关键节点
构建不包含当前节点的图:遍历所有边,若边的两个端点都包含节点i,则将两个端点合并到一个集合
检查连通性:移除节点i后,检查起点x和起点y是否连通(即看find(pre)是否相等),若不连通,说明节点i时关键节点
code
#define _CRT_SECURE_NO_WARNINGS 1
#include<iostream>
#include<vector>
#include<algorithm>
using namespace std;
typedef long long ll;
const int maxn = 1e5 + 10;
typedef pair<int, int> PII;
int pre[maxn];
void init() {
for (int i = 1; i < maxn; i++) {
pre[i] = i;
}
}
int find(int x) {
return pre[x] == x ? x : pre[x] = find(pre[x]);
}
void merge(int x, int y) {
int rootx = find(x);
int rooty = find(y);
if (rootx != rooty) {
pre[rootx] = rooty;
}
}
int main()
{
int n, m;
while (cin >> n >> m) {//操作数
vector<PII> road;
for (int i = 0; i < m; i++) {
int a, b;
cin >> a >> b;
road.push_back({ a,b });
}
int x, y;//查验起点、终点
cin >> x >> y;
int ans = 0;//关键点个数
for (int i = 1; i <= n; i++) {
if (i == x || i == y) continue;//起始点和终点不是关键节点
init();
for (int j = 0; j < m; j++) {//遍历所有的边
PII temp = road[j];//获取第j条边的起点、终点
if (temp.first != i && temp.second != i) {
//若j条边的起点、终点都不是当前节点i,则这条边就不会被当前节点阻断
merge(temp.first, temp.second);
//将边的起点和终点合并至一个集合中,模拟这条边连接作用
}
}
if (find(x) != find(y)) ans++;
//在排除节点i后,检查x和y是否联通,若不联通,说明节点i为一个关键节点
}
cout << ans << endl;
}
return 0;
}
