
搜索
剪枝
分组类
把物品分组放在一起。
类型
- 每组必须要“放满” ,如167. 木棒
- 每组不一定要“放满”,如165. 小猫爬山,1118. 分成互质组
dfs方式
- 枚举每一组中放的物品(枚举组合)
- 枚举每个物品放哪一组 or 新开一组
有种感觉,第一类问题要用解法一,第二类都可以??
还是不太清楚的感觉,因为我还没有想清楚小猫爬山这题,为什么做法一几乎是做法二的五倍 30ms and 150ms
迭代加深
是用时间换空间的做法,感觉起来类似BFS?
使用场景
- 有些分支的层数可能极大,并且求出的答案无用且费事
- 最优解的层数最小。
估价函数优化(IDA*)
用一个估价函数f(<= g(真实步数))使,在当前最大深度下无法求解的分支,直接剪掉。
与 A*类似。
A 与 IDA的选择
当 状态容易表示 状态指数增长较慢 时用 A
当 状态表示很大 状态指数增长较快 时用 IDA
(墨染空大佬的总结)
图论
重在建图!!!
注意
要根据数据范围和要求来看
最后选符合的最便利实现方式。
不一定考什么模型就一定用什么。(如:香甜的黄油)
最短路问题
单源点
- 边权均非负
- 朴素版dijkstra(稠密图) $O(n^2)$
- 堆版dijkstra(稀疏图) $O(mlogn)$
- 有负权边
- bellman_ford(SPE:走k次的最短路、判负环) $O(nm)$ (因为负权边要与
INF/2比较来判定无法到达) - spfa(SPE:判负环)(循环队列可以手写qwq 用的是0 - N-1) $O(km…nm)$
- bellman_ford(SPE:走k次的最短路、判负环) $O(nm)$ (因为负权边要与
多源点
- flody
可以有负权边(因为负权边要与INF/2比较来判定无法到达)(不能有负环)
与DP
DP为非拓扑图时转化为最短路问题
多起点或多终点时
考虑用虚拟源点。
虚拟源点就相当于开始时把所有的起点都放入队列。
floyd算法
- 最短路
- 传递闭包
- 找最小环 d[i][j] + g[i][k] + g[k][j]
- 恰好经过k条边的最短路(倍增)
恰好经过k条边的最短路
- bellman_ford - $O(nm)$ - 稀疏图
- 类Floyd的DP + 倍增 - $O(n^3logn)$ - 稠密图
最小生成树
- prim
- 朴素版 $O(n^2+m)$ 稠密图
- 堆版 $O(nlogn + mlogn -> mlogn)$ 与dijkstra相同的优化 基本不用
- kruskal
- $O(mlogm)$ 稀疏图
可以用prim的一定可以用kruskal。
注意
若有负权边(即加一条边方案不严格变坏),不能无脑套模板
拓展
- 生成树和虚拟源点
- 次小生成树(1. 非严格 2. 严格)
- 先求最小生成树,再枚举删去最小生成树的边求解。$O(mlogm + nm)$ (Kruskal)
- 先求最小生成树,再依次枚举非树边,然后将改变加入树中,同时从树中去掉一条边,使最终的图仍是一棵树。$O(m + n^2 + mlogm / mlogn)$(朴素/LCA)
(路径的值是指在最小生成树上的路径)
若求非严格次小生成树,只需要维护两点间的最大路径
若求严格次小生成树,还需要维护两点间的次大路径
负环
常用做法:spfa
- 统计每个点入队次数,某个点入队n次,说明存在负环(与bellman_ford的判断相同)
- 统计当前每个点的最短路所包含的边数,若所包含边数>=n,说明存在负环(推荐)
都基于抽屉原理
全都为-1
1 -> 2 -> 3 -> 1
法1:n(n-1) + 1 -> $n^2$
法2:n -> $n$
注意
下方,指图中存在负环!!不一定与起点相连
1. 存在负环要将所有点入队(不一定全部走得到)相当于建立一个虚拟源点0;
2. dist[i] 任意(把所有点放入)
如果是求从某一点出发的负环,即与某一点连通的负环时,dist还是要memset(dist, 0x3f, sizeof dist)。
不然就需要把所有点放入,再判断负环与起点的连通性,就麻烦了。洛谷负环模板
经验
因为时间复杂度看做$O(nm)$
当所有点的入队次数超过2n - 4n …时,我们就认为图中有很大可能是存在负环的。(超时的话,trick的做法)
from yxc
也可以使用stack栈来操作,经验上效果不错。(同样也可以看洛谷那个模板题,有一个点十分久,这两种做法还是看数据,没有绝对的好坏)
差分约束
用最短路:
Xi <= Xj + Ck
x - 自变量,Ck - 常数
用最长路求解:
Xj <= Xi - Ck
最短路-松弛定理 - 不等式组
i -> j
dist[i] <= dist[j] + w
限制是边对点的限制,点能否都走到是无所谓的!!!
转换后若存在负环,即存在Xi < Xi,即无解
应用
- 求不等式组的可行解
- 源点需要满足的条件:源点需要能够走到所有的边(这样能都满足松弛定理)
- 步骤:
- 把每个不等式转化为边(Xi <= Xj + Ck)-> (Xj -> Xi 长度为Ck)
- 找到一个超级源点,使其可以遍历到所有边
- 存源点求一遍单源最短(长)路
- 存在负(正)环,无解
- 无负(正)环,dist[i]是一个可行解
- 求最大值和最小值,每个变量的最值
- 能求的条件:一定是有某个Xi与常数的关系,不然都只是相对关系
- 结论:
- 若求最小值,则求最长路;若求最大值,则求最短路。
- 转化Xi <= c?
- 建立超级源点0,建立0 -> i,长度为c的边
- 求Xi最大值为例:
通过链式转换后,一定可以得到 Xi <= 0 + c1 + c2 …,一系列上界,取上界的最小值就是Xi的最小值。(每一个上界是从源点走到Xi的所有方案的权和),即求路径的边长和的最小值
理解
Xi的上界or下界有许多,这些上界or下界就是从虚拟源点出来到达Xi的所有方案的路径总长度,也就是Xi要满足的所有条件,因为全都要满足,所以若求最小值,则求最长路;若求最大值,则求最短路。
注意
一定要去看是否所有的限制条件都被考虑到了。
还有结果是合法的之类的。
最近公共祖先LCA
- 向上标记法 - O(n)
- 倍增 - 二进制拼凑 - 预处理 O(nlogn) 查询 O(logn)
- 定义
- fa[i][j]表示从i节点开始,向上走$2^j$步能走到的节点。(0 <= j <= [logn])
j == 0, f[i][j] = fa[i];
j > 0, fa[i][j] = fa[f[i][j - 1], j - 1]; - depth[i]表示i节点的深度
- 哨兵:若从i节点跳$2^j$步会跳过根节点,那么fa[i][j] = 0, depth[0] = 0;(用于判断跳出去的非法状态)
- fa[i][j]表示从i节点开始,向上走$2^j$步能走到的节点。(0 <= j <= [logn])
- 步骤
- 先将两个点跳到同一层(若已经是同一个点就直接退出) 枚举k 从大到小
- 让两个点同时往上跳,跳到最近公共祖先的下一层(若直接跳到公共祖先的话,不能直接判断它是不是最近的公共祖先) 枚举k 从大到小
- 定义
-
Tarjan - 离线求LCA - O(n + m)
- 定义
- 实质:对向上标记法的优化(运用并查集)
- 在DFS时,将所有点分为三大类
2-已经遍历过且回溯过的点(一个节点其对应子树被遍历完的意思)1-正在搜索的分支0-还未搜索到的点
- 寻找现在遍历到的点a相关的点b,若这个相关点b已经被遍历过,那么lca(a, b)就是b现在所被合并到当前正在搜索分支上的某个节点。
- 遍历并回溯了一个点就可以把这个点合并到父节点
- 遍历完一个再查是为了get_fa(v)是最近公共祖先
from 算法提高课
- 定义
-
RMQ(不常用)预处理 - O(nlogn) 查询 - O(1)
- 做法
- 先求dfs序(回溯也要记一次)
- 求lca(x, y),在dfs序中找到任意一个x和y,找到x和y之间深度最小的节点编号即最小值,也就转化为区间最小值了。
- 做法
在线 - 问一个答一个
离线 - 全问完了,回答
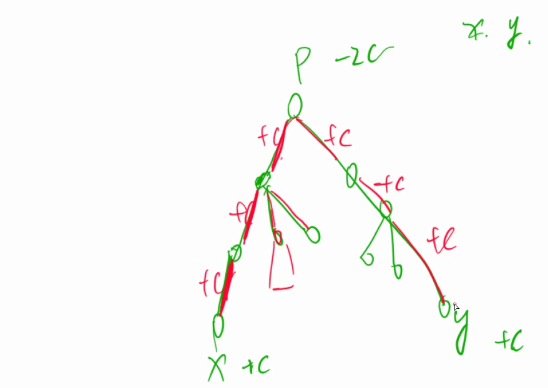
树上差分
x, y, c
d(x) += c
d(y) += c
d(anc) -= c * 2
- 每个点的值就是以这个点为根的子树里的和
对anc以上,x、y以下也没有变化
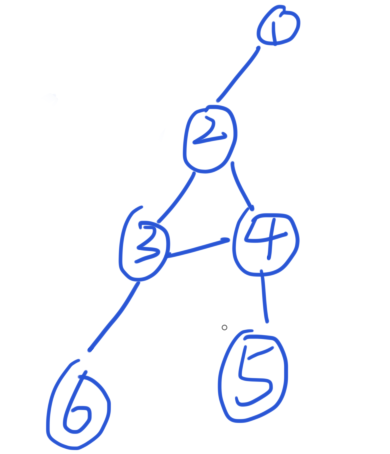
有向图的强连通分量 O(n + m)
- 概念
连通分量:u、v可以互相到达
强连通分量(SCC),即极大连通分量。加入任何点就不是连通分量的 连通分量
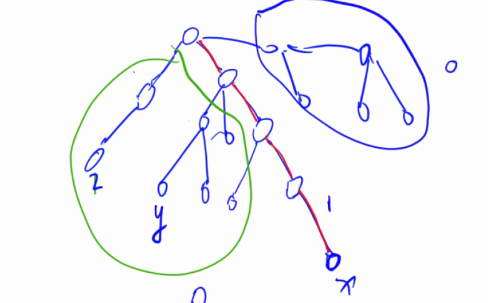
对于一个搜索树,有向边(x, y)(由第一次DFS遍历到的时间节点来编号等得到的时间戳dfn[])
树枝边:x是y的父节点(特殊的前向边)
前向边:x是y的祖先(所有的包括自己的父辈之一)节点
后向边:y是x的祖先节点(往回搜)
横叉边:除了以上三种情况的边(dfn[y] < dfn[x], y已经被搜过了)
dfn[u]遍历到u的时间戳
low[u]从u开始走,它所能遍历到的最小的时间戳
u是其所在强连通分量的最高点,等价于low[u] == dfn[u] - 判断x是否在SCC中
- 存在后向边指向祖先节点
- 存在一个横叉边,通过横叉边走到祖先节点
in_stk = true 说明还没有回溯。
(这个我不知道怎么描述,通过代码+图的方式可能好说明)
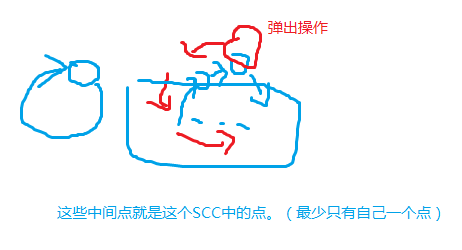
应用
将任意一个有向图通过缩点(将所有的连通分量缩成一个点)的方式转化为有向无环图(DAG、拓扑图)
后用拓扑序递推方式求最短路or最长路
有向图!!!
缩点 重新建图 按拓扑序求解!!!
模板
void tarjan(int u)
{
dfn[u] = low[u] = timestamp ++;
stk[++ top] = u, in_stk[u] = true;
for(int i = h[u]; ~i; i = ne[i])
{
int v = ver[i];
if(!dfn[v]) // 树枝边
{
tarjan(v);
low[u] = min(low[u], low[v]);
}
else if(in_stk(v)) // 不是向下的边,横叉边是不需要考虑的,因为是`有向图`,不能够构成一个连通分量
low[u] = min(low[u], dfn[v]);
}
if(dfn[u] == low[u])
{
int v;
++ scc_cnt;
do
{
v = stk[top --];
in_stk[v] = false;
id[v] = scc_cnt;
} while(u != v);
}
}
缩点 -> DAG
for(int i = 1; i <= n; i ++)
for i 所有邻点
if(i 和 v不在一个SCC)
add(id(i), id(v)); // 连通块相连(有时不用真的建图,可能只是入读和初度)
注意
SCC编号递减的顺序一定是拓扑序
因为不一定联通, 但每个点都应该要在缩点后的集合内有对应的点
for 所有的点
if(!dfn[i]) tarjan(i);
tarjan不是能做所以最长路,且对空间复杂度要求较高。
结论
对一个有向图,把它变为scc需要加max(p, q)条边(p出度为0,q入度为0的点的个数)
无向图的双连通分量
- 概念
对于无向图来说。
双连通分量,即重连通分量。- 边双连通分量
把桥这条边删去,整个图不连通
极大的不包含桥的连通块
性质:
1. 不管在内部删掉那条边,图还是连通的
2. 存在两条没有公共边的路径 - 点双连通分量
割点,把割点删除后这个图不连通
极大的不包含割点的连通块
每个割点至少属于两个连通分量
性质:
1.
2.
两个割点之间的边不一定是桥
桥的两个端点也不一定是割点
(两者没啥关系)
树的边是桥,每个点事边连通分量
所有的边是点连通分量
- 边双连通分量
边双连通分量
无向图中不存在横叉边
维护dfn,low
- 如何找到桥
y不能走到x或x的祖宗
dfn[x] < low[y];
- 如何找到所有的边的双连通分量
- 把所有的桥删掉
- 用栈 dfn[x] == low[x], x走不回x的父节点
缩点之后是一棵树,边都是桥
度数为1的点至少要加一条边(最少的加边方法就是把两个度数为1的点连一条边)
连了之后导致x,y点分别到根节点的路径都变为不是桥。
点双连通分量
- 如何求割点
dfn[x] <= low[y];- 如果x不是根节点,那么x就是割点
- x是根节点,至少有两个子节点割点
- 如何求点双连通分量
if(dfn[x] <= dfn[y])
{
cnt ++;
if(x != root || cnt > 1) cnt[x] = true;
将栈中元素弹出弹到y位置为止,且x也属于该点双连通分量(x == y 显然,x < y 弹出后只剩x和y的边,是一个双连通分量)
}
开始时要特判若是孤立点也是双联通分量。
缩点之后是一棵树,点是v-dcc
每次都会把会使它自己成为割点的点(那条分支的子节点弹完,也就是弹到v)都弹掉(最后把自己u补上去),这样之后它就不是割点,也就是说存在当前栈中的点(到割点 or 根节点的点)构成一个v-dcc
割点向包含它的v-dcc连条边,只是为了说起来方便,实际上就是直接把割点就放在那个v-dcc中了
(好用的样例 from ioj)
模板
不经过in_e这条边,无法回到x点或其他祖宗节点
e-dcc
int id[N], dcc_cnt;
bool is_bridge[M];
int indeg[N];
// 要存from 成对变换
void tarjan(int u, int from) // in_e
{
stk[++ top] = u;
dfn[u] = low[u] = ++ timestamp;
for(int i = h[u]; ~i; i = ne[i])
{
int v = ver[i];
if(!dfn[v])
{
tarjan(v, i);
low[u] = min(low[u], low[v]);
if(dfn[u] < low[v])
is_bridge[i] = is_bridge[i ^ 1] = true;
}
else if(i != (from ^ 1)) // 只要不是往回走的那个边,都可以用来更新(判重边)
low[u] = min(low[u], dfn[v]);
}
if(dfn[u] == low[u]) // 一块
{
++ dcc_cnt;
int v;
do
{
v = stk[top --];
id[v] = dcc_cnt;
} while(u != v);
}
}
for(int i = 1; i <= n; i ++)
if(!dfn[i]) tarjan(i, -1);
不经过x点回到祖宗节点,它就不是割点。
(不是根节点的情况下)
所以在dfs过程中,若回溯到这个点它的子节点仍不能访问到x之前的点,它就是割点。
根节点就是它至少有两个子节点。
是否对根节点要特判
v-dcc
求割点
void tarjan(int u)
{
dfn[u] = low[u] = ++ timestamp;
int cnt = 0; // 删去u点产生的连通块个数
for(int i = h[u]; ~i; i = ne[i])
{
int v = ver[i];
if(!dfn[v])
{
tarjan(v);
low[u] = min(low[u], low[v]);
if(dfn[u] <= low[v]) cnt ++;
}
else low[u] = min(low[u], dfn[v]);
}
if(u != root && cnt) cnt ++;
}
缩点
int root;
int dcc_cnt;
vector<int> dcc[N];
bool cut[];
void tarjan(int u)
{
stk[++ top] = u;
dfn[u] = low[u] = ++ timestamp;
// 是孤立点
if(u == root && ~h[u])
{
++ dcc_cnt;
dcc[dcc_cnt].push_back(u);
return;
}
int cnt = 0;
for(int i = h[u]; ~i; i = ne[i])
{
int v = ver[i];
if(!dfn[v])
{
tarjan(v);
low[u] = min(low[u], low[v]);
if(dfn[u] <= low[v])
{
cnt ++;
if(u != root || cnt > 1) cut[u] = true; // 对根节点的特判
++ dcc_cnt;
int y;
do
{
y = stk[top --];
dcc[dcc_cnt].push_back(y);
} while(v != y);
dcc[dcc_cnt].push_back(u);
}
else low[u] = min(low[u], dfn[v]);
}
}
}
遍历每个dcc[i][j] 可以求每个dcc[i]中的cut数
结论
一个无向图,加cnt + 1 >> 2 个边可以使他成为边双连通分量(cnt为缩点后度数为1的点的个数)
二分图
- 概念
相邻的点是不属于一个集合,特殊的最大流问题
指无向图
匈牙利算法(基于深搜)
匹配:一组边,没有公共点的集合
最大匹配:边数最多的一组匹配
匹配点:在匹配中的点
非匹配点:不在匹配中的点
增广路径:从一个非匹配点开始走,先走非匹配边再走匹配边最后走到一个非匹配点(左非-> 非 -> 匹 -> … -> 右非) (可以把所有匹配的边去掉变为非匹配的边,增广了)
最小点覆盖,最大独立集,最小路径点覆盖(最小路径重复点覆盖)
最小点覆盖,不止是在二分图,而是在一个图中,从中选出最少的点,使得所有的边有一端可以有一个点
最大独立集,不止是在二分图,选出最多的点,使得选出的点之间(内部)是没有边的。
推导:在二分图中,等价于出掉最少的点,将所有的边都破坏掉,等价于找最小点覆盖,能把所有的边破坏掉。等价于找最大匹配
最大团(与最大独立集互补的),选最多的点,使任意边之间有边
最小路径点覆盖(最小路径覆盖),对一个DAG(有向无环图)来说,用最少的互不相交(点和边都不重复,即点不重复)的路径,将所有点覆盖住
进行拆点(普通的拆点,1 1’ 2 2’,一个出点,一个入点),路径 -> 匹配,路径终点 -> 左部非匹配点
推导:想让求最小路径点覆盖,就是让路径终点最少,左部非匹配点最少,找最大匹配
最小路径重复点覆盖(和最小路径点覆盖类似,只是没有对重复经过的点的限制)
做法:求传递闭包(建了许多新边) -> G’, 在G’求最小路径覆盖。
(最小费用流)最优匹配(给每个边一个权重,达到最大匹配的情况下,最大边权和是多少),KM
(最大流)多重匹配(每个点可以匹配多个点) -
结论(在二分图中)
二分图 == 不存在奇数环 == 染色法不存在矛盾
最大匹配 == 不存在增广路径
(二分图中)最大匹配数 == 最小点覆盖 == 总点数 - 最大独立集 == 总点数 - 最小路径覆盖 -
应用
染色法 - 判定二分图
一般的二分图做法,匈牙利算法 - 求最大匹配数
注意
染色成二分图的染色方案只需保证两个集合内无边,任意一条边的端点在两个集合内。
虽然是无向图问题,但边可以只建有向边
match[],可以看做右边连向(匹配到)左边的边
模板
染色法判二分图
- 注意 可能是非联通的
bool dfs(int u, int c, int limit)
{
color[u] = c;
for(int i = h[u]; ~i; i = ne[i])
{
int v = ver[i];
if(color[v] == c) return false;
else if(!color[v])
if(!dfs(v, 3 - c, limit)) return false;
}
return true;
}
bool check(int mid)
{
memset(color, 0, sizeof color);
for(int i = 1; i <= n; i ++)
if(!color[i])
{
if(!dfs(i, 1, mid)) return ...;
}
}
匈牙利算法
int n1, n2; // n1表示第一个集合中的点数,n2表示第二个集合中的点数
int h[N], e[M], ne[M], idx; // 邻接表存储所有边,匈牙利算法中只会用到从第一个集合指向第二个集合的边,所以这里只用存一个方向的边
int match[N]; // 存储第二个集合中的每个点当前匹配的第一个集合中的点是哪个
bool st[N]; // 表示第二个集合中的每个点是否已经被遍历过
bool find(int x)
{
for (int i = h[x]; i != -1; i = ne[i])
{
int j = e[i];
if (!st[j])
{
st[j] = true;
if (match[j] == 0 || find(match[j]))
{
match[j] = x;
return true;
}
}
}
return false;
}
// 求最大匹配数,依次枚举第一个集合中的每个点能否匹配第二个集合中的点
int res = 0;
for (int i = 1; i <= n1; i ++ )
{
memset(st, false, sizeof st);
if (find(i)) res ++ ;
}
作者:yxc
链接:https://www.acwing.com/blog/content/405/
来源:AcWing
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
欧拉路径和欧拉回路
-
概念
欧拉路径,存在一条S到T的路径,不重不漏地经过每条边一次
欧拉回路,起点和终点是同一个点的欧拉路径 -
结论
- 对于无向图来说(所有边都是连通的,点无所谓)
- 存在欧拉路径的充分必要条件:度数为奇数的点只能有0或2个。
- 存在欧拉路径的充分必要条件:度数为奇数的点只能有0个。
- 对于有向图来说(所有边都是连通的,点无所谓)
- 存在欧拉路径的充分必要条件:要么所有点的出度均等于入度;要么除了两个点之外,其余所有点的出度等于入度,剩余的两个点:一个满足出度比入度多1(起点),另一个满足入度比出度多1(终点)。
- 存在欧拉回路的充分必要条件:所有点的出度均等于入度。
从S开始DFS,一定会在T结束。(度数都为偶数,进来就要出去
- 对于无向图来说(所有边都是连通的,点无所谓)
代码
- 得到欧拉路径的倒序,求最小字典序只需要先找点编号小的
所有u的后继节点,都找过了。
欧拉路径从奇数点开始搜,欧拉回路从任意点开始搜。
用边来判重!!!
时间复杂度 - $O(m^2)$
优化用完每一条边就删去,时间复杂度 - $O(n + m)$
无向图,成对变换,反边要标记。

由图可知,这个dfs由于进去然后continue;出来的无意义行为增加时间复杂度
具体题目:1184. 欧拉回路
dfs(u)
{
for 邻边
dfs // 扩展
把u加到序列中
}
inline void dfs(int u)
{
for(int i = 1; i <= n; i ++)
if(g[u][i])
{
g[u][i] --, g[i][u] --;
dfs(i);
}
ans[++ cnt] = u;
}
int main()
{
cin >> m;
while(m --)
{
int a, b;
cin >> a >> b;
g[a][b] ++, g[b][a] ++;
deg[a] ++, deg[b] ++;
}
int root = 0;
while(!deg[root]) root ++;
for(int i = 1; i <= n; i ++)
if(deg[i] & 1) // 度数为奇数的点
{
root = i;
break;
}
dfs(root);
return 0;
}
拓扑排序
- 概念
拓扑图,有向无环图。
为保证字典序,优先队列编号
模板
先将所有入度为0的点入队
while(q.size())
{
t = q[hh ++];
for t的邻边
if(-- ind[v] == 0) 放入;
}
高级数据结构
并查集
- 概念
带权并查集(时间复杂度与k无关)(维护k类),相对思想(相对距离)
扩展域并查集(O(k)),枚举思想(是第一类…,第二类…) - 应用
合并两个集合
查询某个元素的祖宗节点 - 优化
路径压缩 - O(logn)
按秩合并 - O(logn)(深度小的接在大的后面)
路径压缩 + 按秩合并 - O(alpha(n)) - 扩展
- 维护每个集合的大小 -> 绑定在根节点上
- 每个点到根节点的距离 -> 绑定在每个元素上(维护“多类”,例食物链)(一般维护当前节点到根的关系)
树状数组
- 概念
c[x],以x结尾的长度为2^k的区间和(k位) -
应用
- 快速求前缀和 - O(logn)
- 修改某一个数 - O(logn)
即区间查询,单点修改
-
扩展
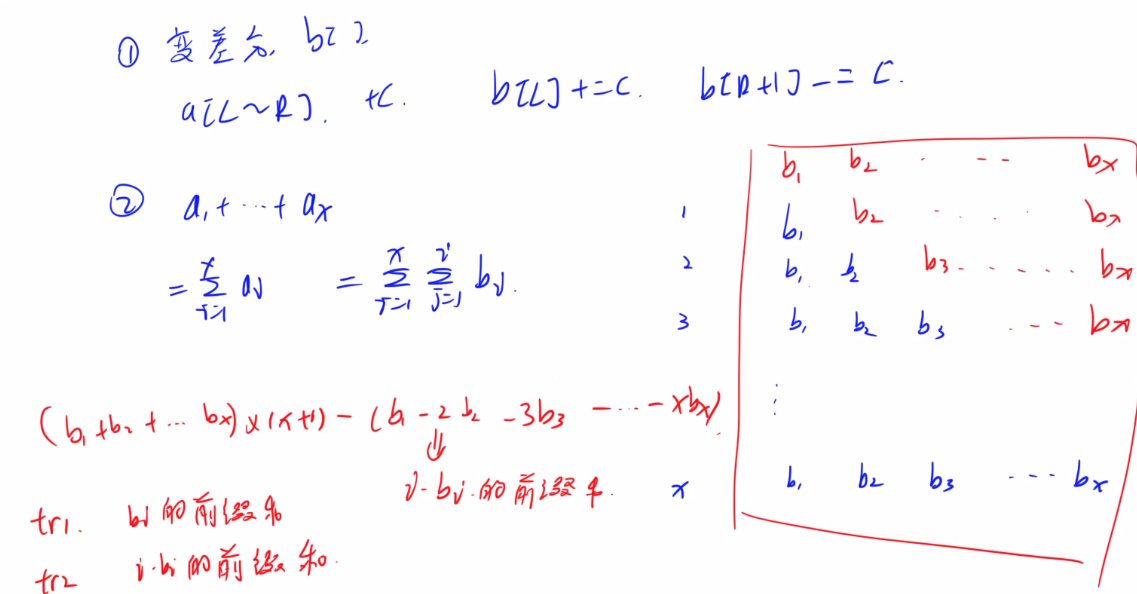
- 区间修改,单点查询 - 差分([l, r] + c -> add(l, c), add(r + 1, -c);
- 区间修改,区间查询 - 差分 + 公式 (原数组a[],差分数组b[]。区间修改使用扩展1,区间求和可以转化为:b的前缀和 * (x + 1) - (i * b)的前缀和,通过维护两个前缀和即可)
- 也是可以求前缀最大值(加法变为取max(只能满足添加数,不能删除数)
求类逆序对
模板
// 修改
for(int i = x; i <= n; i += lowbit(i))
tr[i] += c;
// 查询
for(int i = x; i; i -= lowbit(i))
res += tr[i];
// 初始化1 - O(nlogn) 常用 + 影响不大
for(int i = 1; i <= n; i ++)
add(i, a[i]);
// 初始化2 - O(n)
// 法1
for(int x = 1;x <= n;x ++)
for(int i = x - 1;i >= x - lowbit(x) + 1;i -= lowbit(i)) // 是i >= x - lowbit(x) + 1
tr[x] += tr[i];
// 法2
// 先求前缀和,然后c[x] = s[x] - s[x - lowbit(x)]
// 若是初始化为1的话,可以之间 tr[i] = lowbit(i);
线段树
- 基本操作
- pushup(u)
- build(),将一段区间初始化为线段树
- modify(),修改
- 单点
- 区间 - lazydown
- query()
- 应用
懒标记
扫描线法 (区间修改,区间查询)例
1. 操作1:将[l, r] + k(-1 or 1)
2. 操作2:求整个区间中长度>0的区间总长是多少 - 扫描线性质
- 永远只考虑根节点的信息([L, R])说明query时不会lazydown,也就是不用lazydown
- 所有操作是成对出现,且先加后减 - 加tag的地方与减的地方是一样的,不会向下传
求某个区间的某种属性,问的要存下来,还有辅助信息(能不能由两个子区间算出来)。
模板
该模板的子节点区间是[l, mid], [mid + 1, r]
有时query需要维护数据比较多时,可以采取返回结构体的做法,
把updata(Node &u, Node &l, Node &r)
struct Node
{
int l, r;
int v;
int tag; 给当前节点为根的每个节点加上tag。(不包含根节点) // 包不包含要统一
} tr[N * 4];
// 用子节点信息更新父节点信息
updata(Node &u, Node &l, Node &r)
{
}
void push_up(int u)
{
tr[u].v = max(tr[u << 1].v, tr[u << 1 | 1].v)
}
// 将父节点的懒标记传递下来
void lazy_down(int u) // 查询时把tag传下去,并且清空父节点的tag
{
if(tr[u].tag)
{
left.tag += tr[u].tag, left.sum += (left.r - left.l + 1) * tag;
right ...
tr[u].tag = 0;
}
}
// 建树
void build(int u, int l, int r)
{
tr[u] = {l, r}; // 不要忘记更新,一定要确定u的区间
if(l == r) return;
int mid = l + r >> 1;
build(u << 1, l, mid), build(u << 1 | 1, mid + 1, r);
// push_up()
}
// 修改
void modify(int u, int x, int c) //单点
{
if(tr[u].l == x && tr[u].r == x) tr[u].v = c;
else
{
int mid = tr[u].l + tr[u].r >> 1;
if(x <= mid) modify(u << 1, x, c);
else modify(u << 1 | 1, x, c);
push_up(u);
}
}
// 询问
void query(int u, int l, int r)
{
if(tr[u].l >= l && tr[u].r <= r) return tr[u].v;
int mid = tr[u].l + tr[u].r >> 1;
int v = 0;
if(l <= mid) v = query(u << 1, l, r);
if(r > mid) v = max(v, query(u << 1 | 1, l, r);
return v;
}
可持续化数据结构
- 可持久化的前提: 本身的拓扑结构不变
解决的问题: 历史记录, 可以存下来数据结构的所有历史版本
只记录当前版本与前一个版本不同的节点
trie的可持久化
线段树的可持久化 - 主席树
平衡树 - Treap
AC自动机
树链剖分
数学知识
质数相关
试除法求素数
bool is_prime(int x)
{
if(x < 2) return false;
for(int i = 2; i <= x/i; i ++)
if(x % i == 0) return false;
return true;
}
分解质因数
void div(int x)
{
for(int i = 2; i <= x/i; i ++)
if(x % i == 0)
{
int cnt = 0;
while(x % i == 0)
{
x /= i;
cnt ++;
}
printf("%d %d\n", i, cnt);
}
if(x > 1) printf("%d %d\n", x, 1);
}
筛选法求素数
朴素筛法 $O(nlogn)$ (所有数向上筛)
void get_primes(int x)
{
for(int i = 2; i <= x; i ++)
{
if(!st[i]) prime[cnt ++] = i;
for(int j = i + i; j <= x; j += i)
st[j] = true;
}
}
埃氏筛法 $O(nloglogn)$ (质数向上筛)
void get_primes(int x)
{
for(int i = 2; i <= x; i ++)
if(!st[i])
{
prime[cnt ++] = i;
for(int j = i + i; j <= x; j += i)
st[j] = true;
}
}
线性筛素数 $O(n)$ (最小质因子筛)
void get_primes(int x)
{
for(int i = 2; i <= x; i ++)
{
if(!st[i]) prime[cnt ++] = i;
for(int j = 0; prime[j] <= x / i; j ++) //(不用cnt 质数 == 时break 合数 到i的最小质因子break)
{
st[prime[j] * i] = true;
if(i % prime[j] == 0) break;
}
}
}
约数(因子)相关
试除法求约数(因子) $O(sqrt(n))$
vector<int> get_divisors(int n)
{
vector<int> res;
for(int i = 1; i <= n/i; i ++)
if(n % i == 0)
{
res.push_back(i);
if(n/i != i) res.push_back(n/i);
}
sort(res.begin(), res.end());
return res;
}
约数(因子)个数
n = p1^a1 * p2^a2 ... * pk^ak.
ans = (a1+1)*(a2+1)...*(ak+1); // 本质上把所有质因子存在个数从[0, a]都弄了一遍
约数(因子)之和
n = p1^a1 * p2^a2 ... * pk^ak.
ans = (p1^0+p1^1+...+p1^a1)*(pk^0+pk^1+...+pk^ak); //拆开括号,就是上面的所有组合了,加起来就是它们的和了
最大公约数
int gcd(int a, int b)
{
// if(a % b == 0) return b;
// return gcd(b, a % b);
return b ? gcd(b, a % b) : a;
}
欧拉函数相关
公式法求欧拉函数
// n = p1^a1 * p2^a2 ... * pk^ak.
// res = n*(1-1/a1)*(1-1/a2)...(1-1/ak);
// res = n /a1*(a1-1)*...; 为了避免出现小数
cin >> a;
int res = a;
for(int i = 2; i <= a/i; i ++)
{
if(a % i == 0)
{
res = res / i * (i - 1);
while(a % i == 0) a /= i;
}
}
if(a > 1) res = res / a * (a - 1);
筛法求欧拉函数
inline void get_eulers()
{
phi[1] = 1;
for(int i = 2; i <= n; i ++)
{
if(!st[i])
{
primes[cnt ++] = i;
phi[i] = i - 1;
}
for(int j = 0; primes[j] <= n / i; j ++)
{
int t = primes[j] * i;
st[t] = true;
if(i % primes[j] == 0)
{
phi[t] = phi[i] * primes[j];
break;
}
phi[t] = phi[i] * (primes[j] - 1);
}
}
}
快速幂相关
快速幂模板
// 有时中途要转LL
int qpm(int a, int b, int p)
{
int ans = 1 % p, t = a;
while(b)
{
if(b & 1) ans = (LL)ans * t % p;
t = (LL)t * t % p;
b >>= 1;
}
return ans;
}
快速幂求逆元(与欧拉定理$O(nsqrt(n))$or费马小定理结合$O(nlogn)$)
乘法逆元的定义
若整数 b,m 互质,并且对于任意的整数 a,如果满足 b|a,则存在一个整数 x,使得 a/b≡a×x(modm),则称 x 为 b 的模 m 乘法逆元,记为 b−1(modm)。
b 存在乘法逆元的充要条件是 b 与模数 m 互质。当模数 m 为质数时,bm−2 即为 b 的乘法逆元。
#include <iostream>
#include <algorithm>
#include <cstdio>
#include <cstring>
using namespace std;
typedef long long LL;
inline int qpm(int a, int b, int c)
{
int ans = 1 % c;
while(b)
{
if(b & 1) ans = (LL)ans * a % c;
a = (LL)a * a % c;
b >>= 1;
}
return ans;
}
int main()
{
ios::sync_with_stdio(0);
cin.tie(0);
int T; cin >> T;
while(T --)
{
int a, p;
cin >> a >> p;
if(a % p == 0) cout << "impossible" << endl; // 0 不存在逆元
else cout << qpm(a, p-2, p) << endl; // 不能判qpm()的值不为0 因为 p=2的时候 2, 2, 是1
}
return 0;
}
ex_gcd相关
裴蜀定理:
对于任意正整数a,b, 一定存在(非零?)整数x, y使得 ax + by = gcd(a, b)
因为我们已知下一层的结果, 即:bx+(a%b)y = d
可化为 bx+(a-a/b*b)y = d
整理得 ay + b(x-a/b*y) = d
这里的ay的y是现在这一层的x, 这里的(x-a/b*y)是现在这一层的y
所以有t = x, x = y, y = t-a/b*y
inline void ex_gcd(int a, int b, int &x, int &y)
{
if(!b)
{
x = 1, y = 0;
return;
}
ex_gcd(b, a % b, x, y);
int t = x;
x = y, y = t-a/b*y;
}
int main()
{
int a, b, x, y;
cin >> a >> b;
ex_gcd(a, b, x, y);
cout << x << ' ' << y << endl;
return 0;
}
解线性同余方程
ax = c(mod b),即 ax+by=c
方程有解当且仅当gcd(a,b)|c
通解, x = x0 - b/d, y = y0 + a/d
a(x0-b/d)+b(y0+a/d) = d
所以求最小的非负x的解, 就是x = (x%b+b)%b
注意 解出的x是ax+by=d的解,而非ax+by=c的解,注意要乘上c/d才行.
然后解出的解一定可以控制在[0, b-1]之间的(最小的)
(注意转LL)
下面这题不用保证正负
inline int ex_gcd(int a, int b, int &x, int &y)
{
if(!b)
{
x = 1, y = 0;
return a;
}
int d = ex_gcd(b, a % b, x, y);
int t = x;
x = y, y = t-a/b*y;
return d;
}
int main()
{
ios::sync_with_stdio(0);
cin.tie(0);
int T; cin >> T;
while(T --)
{
int a, b, c, d, x, y;
cin >> a >> c >> b;
d = ex_gcd(a, b, x, y);
if(c % d == 0) cout << (LL)x*c/d % b << endl;
else cout << "impossible" << endl;
}
return 0;
}
中国剩余定理(crt)相关
m1, m2, … mk两两互质
M = m1m2…mk
Mi = M/mi 与 mi互质, 可得Mi的逆
构造通解: x = a1*M1*M1$^{-1}$+a2*M2*M2$^{-1}$+…+ak*Mk*Mk$^{-1}$
LL n, x, y;
LL A = 1;
LL a1[N], a2[N], b[N];
void ex_gcd(LL a, LL b, LL &x, LL &y)
{
if(!b)
{
x = 1, y = 0; // 0 -> d - 1
return;
}
ex_gcd(b, a % b, x, y);
LL t = x;
x = y, y = t - a / b * y;
return;
}
int main()
{
cin >> n;
for(int i = 1; i <= n; i ++)
{
cin >> a1[i] >> b[i];
A *= a1[i];
}
for(int i = 1; i <= n; i ++) a2[i] = A / a1[i]; // Mi
LL res = 0;
for(int i = 1; i <= n; i ++)
{
ex_gcd(a2[i], a1[i], x, y);
res = res + b[i] * a2[i] * ((x % a1[i] + a1[i]) % a1[i]);
}
cout << res % A << endl;
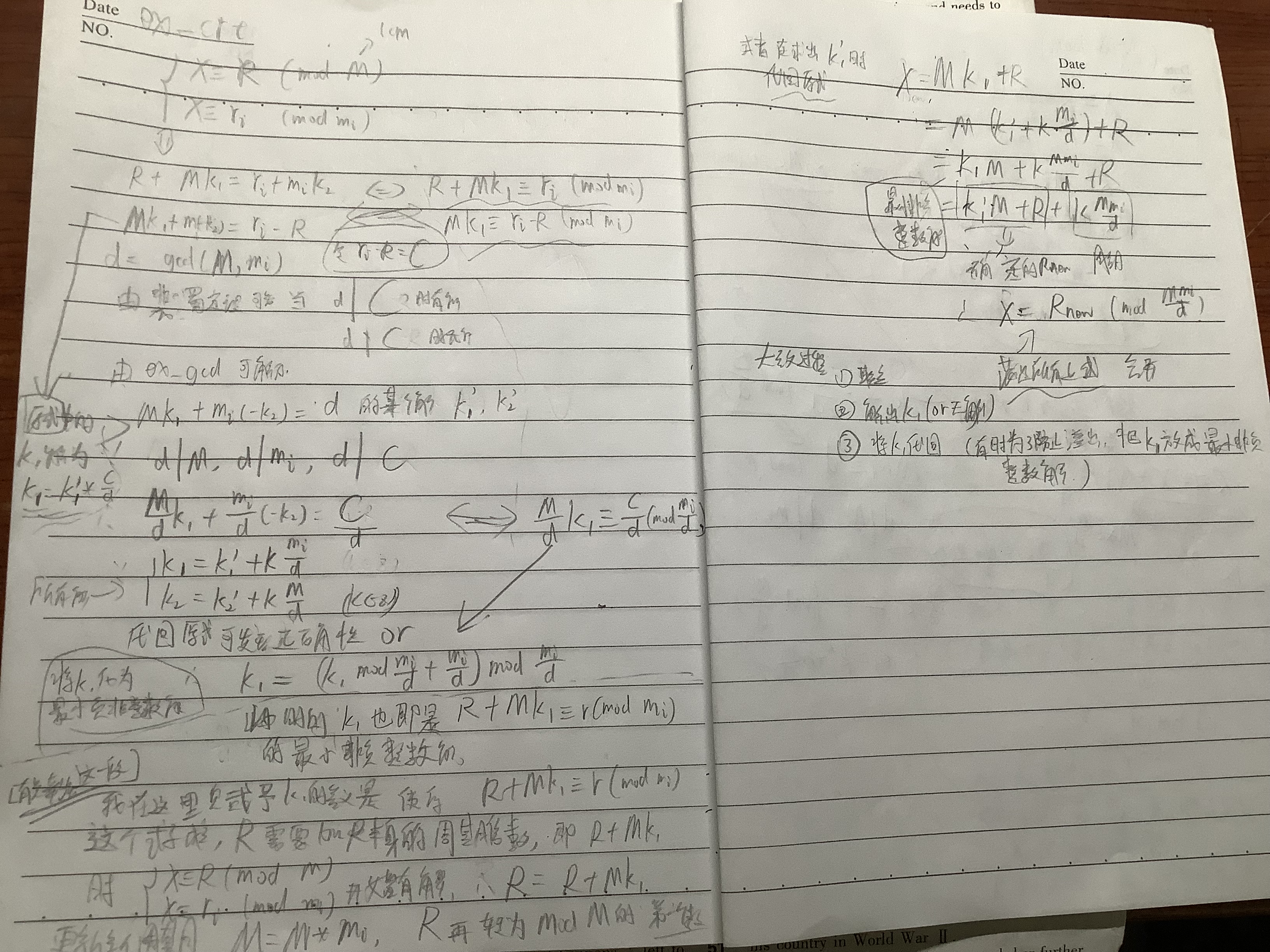
扩展中国剩余定理(ex_crt)
若m1, m2 … mk之间不一定互质
自己写的推导第一版
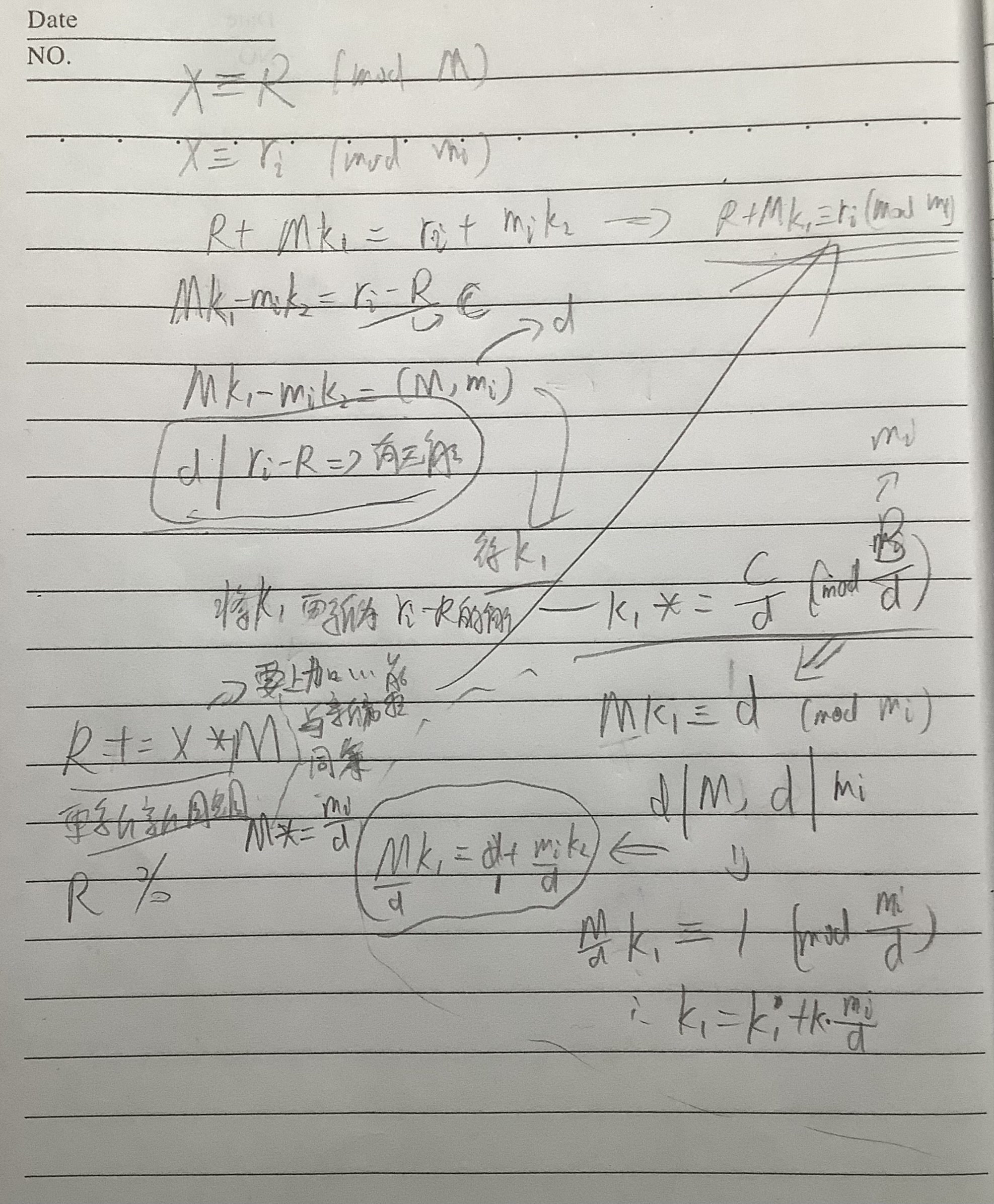
自己写的推导第二版
#include <iostream>
#include <algorithm>
#include <cstdio>
#include <cstring>
using namespace std;
typedef long long LL;
const int N = 1e5 + 10;
int n;
LL r[N], m[N];
LL mod(LL a, LL b)
{
return (a%b+b)%b;
}
LL qmul(LL a, LL b, LL P)
{
LL ans = 0;
while(b)
{
if(b & 1) ans = (ans + a) % P;
a = a * 2 % P;
b >>= 1;
}
return ans;
}
LL ex_gcd(LL a, LL b, LL &x, LL &y)
{
if(!b)
{
x = 1, y = 0;
return a;
}
LL d = ex_gcd(b, a % b, x, y);
LL t = x;
x = y, y = t - a / b * y;
return d;
}
LL ex_crt()
{
LL A, B, C, d, x, y, R, M; // R - 余数,答案, M - lcm(m1 ... mn)
M = m[1], R = r[1];
for(int i = 2; i <= n; i ++)
{
A = M, B = m[i], C = (r[i] - R % B + B) % B; // 防溢出
d = ex_gcd(A, B, x, y); // 求出 == d时的x
if(C % d != 0) return -1; // 无解
x = mod(qmul(x, C/d, B/d), B/d); // 更新为 == C的x答案同时保证最小非负整数(其实可以不用, 只要取mod变小就好了)
// x = x * C/d % (B/d); // 更新为 == C的x答案
// x = mod(x*C/d, B/d); 保证最小非负整数(其实可以不用, 只要取mod变小就好了)
R += x * M; // 更新R
M *= B/d; // 更新M, 乘倍数即可
R = (R % M + M) % M;
}
return (R % M + M) % M;
}
int main()
{
scanf("%d", &n);
for(int i = 1; i <= n; i ++) scanf("%lld%lld", &m[i], &r[i]);
printf("%lld\n", ex_crt());
return 0;
}
/*
x = R(mod M)
x = ri(mod mi)
*/
/*
ax = r(mod m[i])
*/
高斯消元相关
一般能够在$O(n^3)$的时间复杂度内,求解包含n个方程, n个未知数的,多元线性方程组.
解有三种情况:无解, 无穷多组解, 唯一解.
输入的是n(n+1)的矩阵(系数nn, n是常数)
行列变换操作:
初等行列变换
1. 把某一行乘一个非零的数
2. 交换某2行
3. 把某行的若干倍加到另一行上去
// -> 上三角形式
a11*x1+.....+a1n*xn=b1
a22*x2+...a2nxn=bn
...
xn=bn
解所对应的情况
1. 完美阶梯型 -> 唯一解
2. 0 = 非零(矛盾) -> 无解
3. 0 = 0(有方程可以被别的表示出来) -> 无穷多组解
算法步骤:
- 找到当前列绝对值最大且还没有处理的一行(为了处理好精度问题)
- 将该行换到(当前)最上面去
- 将该行第一个数变为1
- 将下面所有行的当前列削成0
模板
#include <iostream>
#include <algorithm>
#include <cstdio>
#include <cstring>
#include <cmath>
using namespace std;
const int N = 110;
const double eps = 1e-6;
int n;
double a[N][N];
inline int gauss()
{
int c, r;
for(c = r = 0; c < n; c ++) // c->列, r->行
{
int t = r;
for(int i = r; i < n; i ++) // find max_fabs
if(fabs(a[i][c]) > fabs(a[t][c]))
t = i;
if(fabs(a[t][c]) < eps) continue; // about Xc none
for(int i = c; i < n+1; i ++) swap(a[t][i], a[r][i]); // max->top
for(int i = n; i >= c; i --) a[r][i] /= a[r][c]; // 化1-从后往前
for(int i = r+1; i < n; i ++) // 其他化0
if(fabs(a[i][c]) > eps) // 不为0才需要化
for(int j = n; j >= c; j --) // 从后往前
a[i][j] -= a[i][c] * a[r][j];
r ++;
}
if(r < n) // 有x没有解出
{
for(int i = r; i < n; i ++) // r~n-1 左边为0, 右边是否为0
if(fabs(a[i][n]) > eps) return 0; // 0 = 非0 无解
return 2; // 0 = 0 无数个解
}
for(int i = n-1; i >= 0; i --) // 求解每个x
for(int j = i+1; j < n; j ++)
a[i][n] -= a[i][j]*a[j][n]; // 不为0才需要消(要乘系数)
return 1; // 唯一解
}
int main()
{
cin >> n;
for(int i = 0; i < n; i ++)
for(int j = 0; j < n+1; j ++)
cin >> a[i][j];
int res = gauss();
if(res == 1)
{
for(int i = 0; i < n; i ++)
printf("%.2lf\n", a[i][n]);
}
else if(res == 0) puts("No solution");
else puts("Infinite group solutions");
return 0;
}
高斯消元解异或线性方程组
过程一致
^看作不进位的2进制加法
#include <iostream>
#include <algorithm>
#include <cstdio>
#include <cstring>
#include <cmath>
using namespace std;
const int N = 110;
int n;
int a[N][N];
inline int gauss()
{
int c, r;
for(c = r = 0; c < n; c ++) // c->列, r->行
{
int t = r;
for(int i = r; i < n; i ++) // find max_fabs
if(a[i][c])
{
t = i;
break;
}
if(!a[t][c]) continue; // about Xc none
for(int i = c; i < n+1; i ++) swap(a[t][i], a[r][i]); // max->top
// for(int i = n; i >= c; i --) a[r][i] /= a[r][c]; // 化1-从后往前
for(int i = r+1; i < n; i ++) // 其他化0
if(a[i][c]) // 不为0才需要化
for(int j = n; j >= c; j --) // 从后往前(异或无所谓)
a[i][j] ^= a[r][j];
r ++;
}
if(r < n) // 有x没有解出
{
for(int i = r; i < n; i ++) // r~n-1 左边为0, 右边是否为0
if(a[i][n]) return 0; // 0 = 非0 无解
return 2; // 0 = 0 无数个解
}
for(int i = n-1; i >= 0; i --) // 求解每个x
for(int j = i+1; j < n; j ++)
a[i][n] ^= a[i][j]*a[j][n]; // 不为0才需要消(要乘系数)
return 1; // 唯一解
}
int main()
{
cin >> n;
for(int i = 0; i < n; i ++)
for(int j = 0; j < n+1; j ++)
cin >> a[i][j];
int res = gauss();
if(res == 1)
{
for(int i = 0; i < n; i ++)
printf("%d\n", a[i][n]);
}
else if(res == 0) puts("No solution");
else puts("Multiple sets of solutions");
return 0;
}
组合数相关
根据题目选择求解方式
${b \choose a}$
预处理-递推-$O(nm)$-组合数1
for(int i = 0; i < N; i ++)
for(int j = 0; j <= i; j ++)
if(!j) c[i][j] = 1;
else c[i][j] = c[i-1][j]+c[i-1][j-1];
输出: c[a][b]
预处理-快速幂+逆元-$O(nlogn)$-组合数2
模数要是质数
inline void prev_calu()
{
fact[0] = infact[0] = 1;
for(int i = 1; i < N; i ++)
{
fact[i] = (LL)fact[i-1]*i%P;
infact[i] = (LL)infact[i-1]*qpm(i, P-2, P)%P;
}
}
输出: (LL)fact[a]*infact[b]%P*infact[a-b]%P
Lucas定理-$O(p*logplog_pn)$ -> $O(plognlogp)$-组合数3
${b \choose a} \equiv {b\mod{p} \choose a\mod{p}} * {b/p \choose a/p} \pmod{p}$
$a = a_kp^k+a_{k-1}p^{k-1}+…+a_0p^0$
$b = b_kp^k+b_{k-1}p^{k-1}+…+b_0p^0$
$(1+x)^p = {0 \choose p}x^0+{1 \choose p}x^1+…+{p \choose p}x^p \equiv 1+x^p \pmod{p}$
(累死了直接贴两个blog吧)
Lucas定理证明
卢卡斯定理(十分钟带你看懂)
int qpm(int a, int b)
{
int ans = 1 % p;
while(b)
{
if(b & 1) ans = (LL)ans * a % p;
a = (LL)a * a % p;
b >>= 1;
}
return ans;
}
int C(int a, int b)
{
int res = 1;
for(int i = 1, j = a; i <= b; i ++, j --)
{
res = (LL)res * j % p;
res = (LL)res * qpm(i, p-2) % p;
}
return res;
}
int lucas(LL a, LL b)
{
if(a < p && b < p) return C(a, b);
return (LL)C(a%p, b%p) * lucas(a/p, b/p) % p;
}
输入: a, b, p(p为质数)
输出: lucas(a, b)
从定义出发-组合数4
化简高精度 -> 只写高精乘
分解质因数 $= p_1^{a_1}p_2^{a_2}…p_k^{a_k}$
$a! = \lfloor \frac{a}{p} \rfloor + \lfloor \frac{a}{p^2} \rfloor + …$ 得到a!的p的次数
步骤
1. 筛素数(1~5000)
2. 求每个质数的次数(求a!中p的次数)
3. 高精度乘法
考虑质数的次数的思路很妙!!!
#include <iostream>
#include <algorithm>
#include <cstdio>
#include <cstring>
#include <vector>
using namespace std;
const int N = 5010;
int cnt;
int primes[N], sum[N];
bool st[N];
vector<int> tc;
inline void get_primes(int n)
{
for(int i = 2; i <= n; i ++)
{
if(!st[i]) primes[cnt ++] = i;
for(int j = 0; primes[j] <= n/i; j ++)
{
st[primes[j]*i] = true;
if(i % primes[j] == 0) break;
}
}
}
inline int get(int n, int p)
{
int res = 0;
while(n)
{
res += n/p;
n /= p;
}
return res;
}
inline vector<int> mul(vector<int> a, int b)
{
tc.clear();
int t = 0;
for(int i = 0; i < a.size(); i ++)
{
t += a[i] * b;
tc.push_back(t % 10);
t /= 10;
}
while(t) tc.push_back(t % 10), t /= 10;
return tc;
}
int main()
{
ios::sync_with_stdio(0);
cin.tie(0);
int a, b;
cin >> a >> b;
get_primes(a);
for(int i = 0; i < cnt; i ++)
{
int p = primes[i];
sum[i] = get(a, p) - get(b, p) - get(a-b, p);
}
vector<int> res;
res.push_back(1); // init(); !!
for(int i = 0; i < cnt; i ++)
for(int j = 0; j < sum[i]; j ++)
res = mul(res, primes[i]);
for(int i = res.size()-1; i >= 0; i --)
cout << res[i];
cout << endl;
return 0;
}
Catalan(卡特兰数)
- 公式法: $f[n] = \frac{{n \choose 2n}}{n+1}$
- 递推式: $f[n] = f[n-1]f[0]+f[1]f[n-2]+…+f[0][n-1]$ $f[0] = f[1] = 1$
容斥原理相关
韦恩图做示例:
3个互相相交圆的总面积为: $S1+S2+S3-S1\cap S2-S2\cap S3-S1\cap S3+S1\cap S2\cap S3$
推广:
n个圆, (+)1-2+3-4+…(或者说集合与元素个数)
感觉主要是种思想
可以优化暴力
能被整除的数
$O(nm) -> O(m2^m)$
博弈论相关
- 公平组合游戏ICG:
- 两名玩家交替行动
- 在游戏的任意时刻,玩家可以进行的合法操作与轮到哪名玩家无关
- 不能行动的玩家判负
必胜状态:处必胜状态有某种操作使它到达的状态是必败状态.
必败状态:所有能到的状态都是必胜状态.
Nim游戏
Nim属于公平组合游戏
-
结论:
- $a_1\^a_2\^…\^a_n = 0$ 先手必败
- $a_1\^a_2\^…\^a_n \neq 0$ 先手必胜
-
$0\^0\^…\^0 = 0$ (终值状态)
- $a_1\^a_2\^…\^a_n = x = \neq 0$
x的二进制表示中最高的一位1在第k为, a1~an中必然存在一个数ai, ai的第k位是1
在=x的情况下, 一定存在一种取法使得… = 0 :
ai ^ x < ai
ai - (ai ^ x) > 0
ai - (ai - ai ^ x) = ai ^ x -> (…) ^ x = x ^ x = 0
在=0的情况下, 一定不存在一种取法使得… = 0 :
ai ^ … = 0
ai’ ^ … = 0
两式异或, 得ai ^ ai’ = 0 -> ai = ai’ 与 ai’ < ai矛盾
初始状态 ^… 为多少最后也就为多少.
裸的版本
变种
SG函数
- 概念
Mex运算:在S(一个非负整数集合)中找到不属于这个集合的自然数. {1, 2, 3} -> {0}
SG函数:
SG(终点) = 0; SG(x) = mex{SG(y1), …, SG(yk)} // yi 为 x能到的状态
SG(x) = 0 - 必败(不能到0) SG(x) != 0 - 必胜(可以到0)
多个图, $SG(x_1)\^SG(x_2)…\^SG(x_n) = 0$必败, !=0 必胜
由SG函数理论,多个独立局面的SG值,等于这些局面SG值的异或和(sg(x) = Mex{sg(yi))}
注意:vis的取值, 为???
明确sg的值为不属于sg所能达的所有状态的最小自然数(通过必胜点和必败点理解)
sg的范围是看询问的数值大小, vis是看选择方案的多少
vis数组要为每个sg函数独自开, 要开在里面
sg不定义为0/1而是要定义成这么复杂的东西的原因是可能存在很多个游戏(我可以选择任何一个图来把一个状态变成另一个状态)
多个图可以直接异或sg
#include <iostream>
#include <algorithm>
#include <cstdio>
#include <cstring>
using namespace std;
const int N = 110, M = 1e4 + 10;
int n, m;
int a[N], f[M];
inline int sg(int x)
{
if(f[x] != -1) return f[x];
bool vis[N];
memset(vis, 0, sizeof vis);
for(int i = 0; i < m; i ++)
if(x >= a[i]) vis[sg(x-a[i])] = true;
for(int i = 0; i < N; i ++)
if(!vis[i]) return f[x] = i;
}
int main()
{
ios::sync_with_stdio(0);
cin.tie(0);
memset(f, -1, sizeof f);
cin >> m;
for(int i = 0; i < m; i ++) cin >> a[i];
cin >> n;
int res = 0;
for(int i = 0; i < n; i ++)
{
int x;
cin >> x;
res ^= sg(x);
}
if(res) cout << "Yes" << endl;
else cout << "No" << endl;
return 0;
}
