图像压缩问题
数据结构
DP数组
算法
动态规划求解
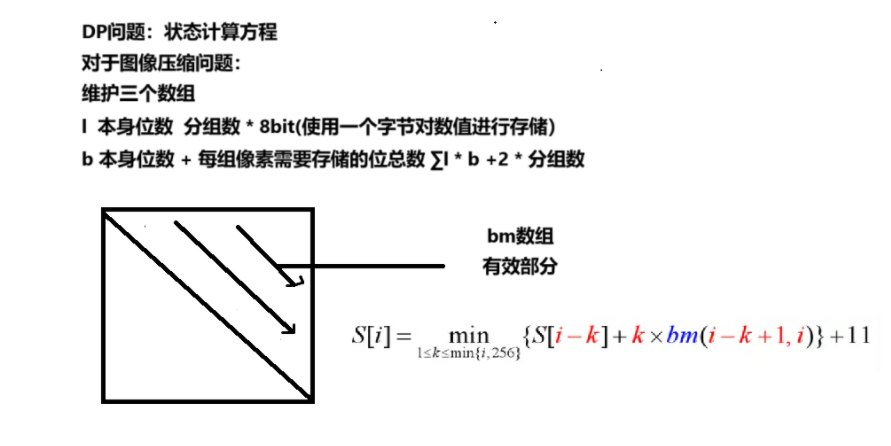
符号说明:
bm[i][j]: 表示从[i,j]区间内图像像素所需的最大表示位数
s[i]: [1,i]区间像素压缩之后的最小比特值
p[i]: 存储像素序号位i的所需的最小比特数
l[i]:存储当前像素需要之前的同一像素段的长度(包括i本身)
b[i]: 当前像素所处像素段的最小比特数
代码
#include<iostream>
#include<cmath>
using namespace std;
const int N=110,M=11; // 每个像素段需要使用额外的11bit存储段信息
int s[N],l[N],b[N],p[N];
int bm[N][N]; // bp[i,j] -> [i - j] 像素点编码长度最大值
int n;
int main(){
cin >> n;
for(int i=1;i<=n;i++){
int x;
scanf("%d",&x);
p[i] = bm[i][i] = ceil(log2(x+1)); // 像素需要从1开始
}
// 初始化bm数组 (上三角部分有效)
for(int l = 1;l <= n-1;l ++){
for(int i = 1;i + l <= n;i ++){
bm[i][i + l] = max(bm[i][i+l-1],p[i + l]);
}
}
// 更新s数组并维护
for(int i=1;i<=n;i++){
b[i] = p[i];
l[i] = 1; // 初始化新段的信息header =11;
s[i]=s[i-1]+bm[i][i];
for(int k=2 ; k<=i & k < 256;k ++){
if(s[i] > s[i - k] + k * bm[i-k+1][i]){
l[i] = k;
b[i]=bm[i-k+1][i];
s[i]=s[i - k] + k * bm[i-k+1][i];
}
}
s[i]+=11; // 3bit段像素长度和8bit长度信息
}
cout<<s[n]<<endl;
// for(int i=1;i<=n;i++){
// cout<<l[i]<<" ";
// }
// cout<<endl;
// for(int i=1;i<=n;i++){
// cout<<b[i]<<" ";
// }
// cout<<endl;
int i=n;
while(i > 0){
cout << "("<<l[i]<<","<<b[i]<<")"<<" ";
i -= l[i];
}
cout<<endl;
return 0;
}
输入数据(复制用)
16
10 9 12 40 50 35 15 12 8 10 9 15 11 130 160 240
测试样例