
题目描述
特殊条件:
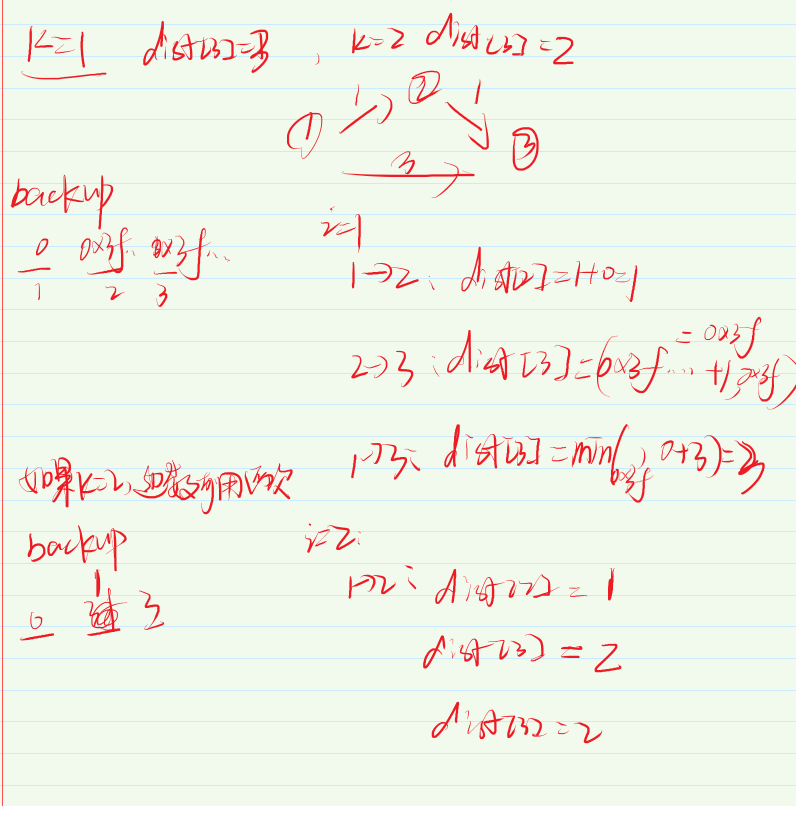
由于有边树限制,需要备份,保证使用的是上一次迭代的结果。
否则可能使用了后面的节点使用了当前节点更改后的结果,这样就没有边树限制了。
创建一个备份数组backup[]
并且因为存在边数限制,不会造成没有最小路的情况。
步骤
存在从a到b的边,权重w
1.循环所有点:
2.循环所有边
迭代次数k:从1号点经过不超过k条边,走向最短路的距离
3. 松弛操作:
Dist[b] = min(dist[b], dist[a] + w)
循环之后,所有边都满足
三角不等式:Dist[b] <= dist[a] + w
$\cal{question1:}$不需要状态数组?
$\cal{Answer:}$再dijkstra算法中,状态数组是结合st,表示距离点1最近的集合,每次都需要找除了这个集合之外最小距离的点;
在bellman算法里,每次更新一条边上的两个点(边信息可以用邻接表或者结构体存放),第一层循环限定了最多找重复多少次,就不需要再加限定了。
$\cal{question2:}$为什么之前的朴素算法dijkstra 循环点,而这次循环边?
$\cal{Answer:}$本质上都是一样的,最后都是更新点。
$\cal{question3:}$为什么dijkstra算法不能求负边?
$\cal{Answer:}$由于有st[]的存在,加负边也可以。
$\cal{question4:}$为什么要循环点再循环边?
$\cal{Answer:}$第一层循环并不是循环点,而是有边数限制,第一层循环次数是边的次数。
如果循环了n次,还是会更新dist, 那么就存在负环。
样例
3 3 1
1 2 1
2 3 1
1 3 3
算法1
(bellman ford) $O(nm)$
时间复杂度
参考文献
C++ 代码
#include<iostream>
#include<cstring>
using namespace std;
const int N = 510, M = 10010;
struct Edge{
int a, b, w;
}edges[M];
int dist[N], backup[N],n, m, k;
int bellford()
{
memset(dist, 0x3f, sizeof dist);
dist[1] =0;
for(int i = 1; i <= k; ++i)
{
memcpy(backup, dist, sizeof dist);
for(int j = 1; j <= m; ++j)
{
int a = edges[j].a, b = edges[j].b, w = edges[j].w;
dist[b] = min(dist[b], backup[a] + w);
}
}
/*可能存在负边*/
if(dist[n] > 0x3f3f3f3f / 2)return -1;
return dist[n];
}
int main()
{
int a, b, c;
cin >> n >>m >> k;
for(int i = 0; i < m; ++i)
{
cin >> a >> b >> c;
edges[i].a = a; edges[i].b = b; edges[i].w = c;
}
int z = bellford();
if(z == -1)puts("impossible");
else cout << z << endl;
return 0;
}
