
题目描述
给定两组点,其中第一组中有 size1 个点,第二组中有 size2 个点,且 size1 >= size2。
任意两点间的连接成本 cost 由大小为 size1 x size2 矩阵给出,其中 cost[i][j] 是第一组中的点 i 和第二组中的点 j 的连接成本。如果两个组中的每个点都与另一组中的一个或多个点连接,则称这两组点是连通的。换言之,第一组中的每个点必须至少与第二组中的一个点连接,且第二组中的每个点必须至少与第一组中的一个点连接。
返回连通两组点所需的最小成本。
样例
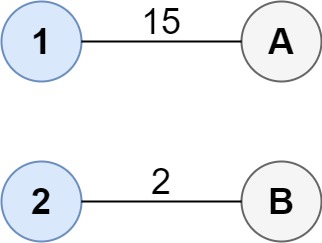
输入:cost = [[15, 96], [36, 2]]
输出:17
解释:连通两组点的最佳方法是:
1--A
2--B
总成本为 17。
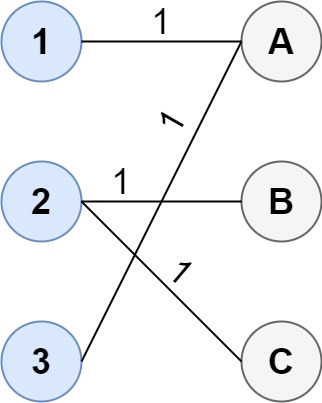
输入:cost = [[1, 3, 5], [4, 1, 1], [1, 5, 3]]
输出:4
解释:连通两组点的最佳方法是:
1--A
2--B
2--C
3--A
最小成本为 4 。
请注意,虽然有多个点连接到第一组中的点 2 和第二组中的点 A,
但由于题目并不限制连接点的数目,所以只需要关心最低总成本。
输入:cost = [[2, 5, 1], [3, 4, 7], [8, 1, 2], [6, 2, 4], [3, 8, 8]]
输出:10
限制
size1 == cost.lengthsize2 == cost[i].length1 <= size1, size2 <= 12size1 >= size20 <= cost[i][j] <= 100
算法1
(状态压缩动态规划) $O(nm \cdot 2^m + n \cdot 3^m)$
- 设状态 $f(i, s)$ 表示连接了第一组的前 $i$ 个点,此时第二组的连通的状态为 $s$。$i$ 的有效下标从 1 开始。$s$ 是一个二进制数字,其 01 分别表示连通和未联通。
- 初始时 $f(0, 0) = 0$,其余为无穷。
- 转移时,对于状态 $f(i, s)$
- 假设 $sub$ 是 $s$ 的一个子集,则可以转移 $f(i, s) = \min(f(i, s), f(i - 1, s \text{xor} sub) + c(i, sub))$,即第一组的点 $i$ 连接第二组 $sub$ 的点。其中 $c(i, sub)$ 表示第一组的点 $i$ 连接第二组 $sub$ 的点的总代价。
- 第一组的点 $i$ 也可以只连接第二组的任意一个点,转移 $f(i, s | (1 << j)) = \min(f(i, s | (1 << j)), f(i - 1, s) + cost(i, j))$。
- 最终答案为 $f(n, (1 << m) - 1)$。
时间复杂度
- 状态数共 $O(n \cdot 2^m)$,预处理需要 $O(nm \cdot 2^m)$,转移需要 $O(m \cdot 2^m + 3^m)$,故总时间复杂度为 $O(nm \cdot 2^n + n \cdot 3^m)$。
空间复杂度
- 需要 $O(n \cdot 2^m)$ 的额外空间存储状态和预处理的代价数组。
C++ 代码
class Solution {
public:
int connectTwoGroups(vector<vector<int>>& cost) {
const int n = cost.size(), m = cost[0].size();
const int INF = 1000000000;
vector<vector<int>> f(n + 1, vector<int>(1 << m, INF));
vector<vector<int>> c(n + 1, vector<int>(1 << m, 0));
for (int i = 1; i <= n; i++) {
c[i][0] = INF;
for (int s = 1; s < (1 << m); s++)
for (int j = 0; j < m; j++)
if ((s >> j) & 1)
c[i][s] += cost[i - 1][j];
}
f[0][0] = 0;
for (int i = 1; i <= n; i++)
for (int s = 1; s < (1 << m); s++) {
for (int sub = s; sub; sub = (sub - 1) & s)
f[i][s] = min(f[i][s], f[i - 1][s ^ sub] + c[i][sub]);
for (int j = 0; j < m; j++)
f[i][s | (1 << j)] = min(f[i][s | (1 << j)],
f[i - 1][s] + cost[i - 1][j]);
}
return f[n][(1 << m) - 1];
}
};
算法2
(状态压缩动态规划) $O(nm \cdot 2^m)$
- 状态表示和初始化算法 1 一样。
- 对于第一组的点 $i$ 来说,连接到第二组的点集的代价与点连接的顺序无关,所以可以优化转移,不再需要枚举子集。
- 转移时
- 第一组的点 $i$ 只连接第二组的任意一个点,转移 $f(i, s | (1 << j)) = \min(f(i, s | (1 << j)), f(i - 1, s) + cost(i, j))$。
- 第一组的点 $i$ 再连接第二组中的一个点,转移 $f(i, s | (1 << j)) = \min(f(i, s | (1 << j)), f(i, s) + cost(i, j))$。这一步替代里算法 1 中的枚举子集。
- 最终答案为 $f(n, (1 << m) - 1)$。
时间复杂度
- 状态数为 $O(n \cdot 2^m)$,转移时间为 $O(m)$,故总时间复杂度为 $O(nm \cdot 2^m)$。
空间复杂度
- 需要 $O(n \cdot 2^m)$ 的额外空间存储状态。
C++ 代码
class Solution {
public:
int connectTwoGroups(vector<vector<int>>& cost) {
const int n = cost.size(), m = cost[0].size();
const int INF = 1000000000;
vector<vector<int>> f(n + 1, vector<int>(1 << m, INF));
f[0][0] = 0;
for (int i = 1; i <= n; i++)
for (int s = 0; s < (1 << m); s++)
for (int j = 0; j < m; j++) {
f[i][s | (1 << j)] = min(f[i][s | (1 << j)],
f[i - 1][s] + cost[i - 1][j]);
f[i][s | (1 << j)] = min(f[i][s | (1 << j)],
f[i][s] + cost[i - 1][j]);
}
return f[n][(1 << m) - 1];
}
};

请问算法1中转移的时间复杂度不应该是O(m+3^m)?
不是,可以再看下
第二种方法能保证枚举到所有情况么? 感觉是不是得按照子集中包含数目的大小来枚举?
可以的,假设最优情况下第一组的点 $i$ 对应了第二组的点 $(j_1, j_2, \dots, j_t)$,由于集合与顺序无关,所以不妨假设第二组的点按照编号排序。首先 $i$ 与 $j_1$ 会从 $i - 1$ 转移,然后枚举到 $j_2$ 时,会从 $i$ 带有 $j_1$ 的转移,以此类推。随意最终所有情况都可以枚举到