
一个建图的小优化
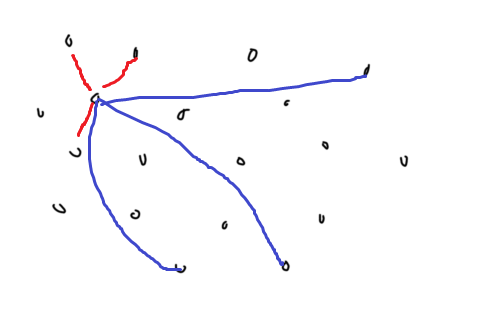
如上图所示:
在建立最少生成树时,最终的边实际上是每个点周围邻域中的边(红色所示),而蓝色边是没用的“废边”。
在未优化前,实际上建立了一张完全图,这样的边数是n^2量级。最小生成树是一张稀疏图,有效可选边应是边数为n量级的稀疏图。
因此,有了一个下面非常初级的优化,计算图中最大边,然后在建边时只选择长度远小于最大边值的边。
未做优化前运行时间128ms,优化后22ms。
这里,希望yxc和其他大佬能够留言解答,如何“局域性质的”建立有效边,有没有相关算法。
代码:
#include <iostream>
#include <algorithm>
#include <cmath>
using namespace std;
const int N = 510, M = N * N / 2;
typedef pair<int, int> PII;
struct Edge {
int x, y;
double w;
bool operator<(const Edge &e) const {
return w < e.w;
}
} edges[M];
int n, k, p[N], m;
PII q[M];
int find(int x) {
return p[x] == x ? x : p[x] = find(p[x]);
}
double getDist(PII &a, PII &b) {
int dx = a.first - b.first, dy = a.second - b.second;
return sqrt(dx * dx + dy * dy);
}
int main() {
cin >> n >> k;
int lr = 1e9, lc = 1e9, hr = 0, hc = 0;
for (int i = 1; i <= n; i++) p[i] = i;
for (int i = 0; i < n; i++) {
cin >> q[i].first >> q[i].second;
lr = min(lr, q[i].first);
lc = min(lc, q[i].second);
hr = max(hr, q[i].first);
hc = max(hc, q[i].second);
}
PII x = {lr, lc}, y = {hr, hc};
double tot = getDist(x, y) / 10;
for (int i = 0; i < n; i++)
for (int j = i + 1; j < n; j++) {
double t = getDist(q[i], q[j]);
if (t > tot && n > 50) continue;
edges[m++] = {i, j, t};
}
sort(edges, edges + m);
int cnt = n;
double res = 0;
for (int i = 0; i < m; i++) {
if (cnt <= k) break;
int a = find(edges[i].x), b = find(edges[i].y);
if (a != b) {
cnt--;
p[a] = b;
res = edges[i].w;
}
}
printf("%.2lf\n", res);
return 0;
}

出发点是好的,但如何划定邻域呢?远小于是个模糊的概念,很容易被精心构造的数据卡掉
其实这种的优化很常见,这种二维平面上的点类似于网格图,最小生成树的边一定是网格内的边。但用在此题上需要考虑如何定义和找到邻域
是的,应该考虑点在二维平面中的相对位置然后建边,不知道如何实现,感觉这种局部建边的算法是有实际价值的。